[James Bruton]’s unusual Möbius Tank has gotten a little more unusual with the ability to bend itself, which allows it to perform turns even though it is a single-track vehicle.
The Möbius Tank was a wild idea that started as a “what if” question: what if a tank tread was a Möbius strip? We saw how [James] showed it could be done, and he demonstrated smart design and assembly techniques in the process.
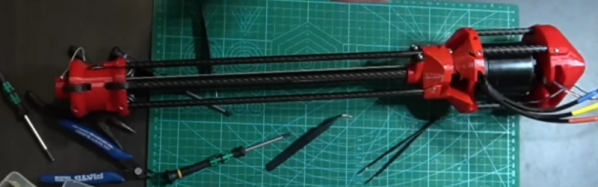
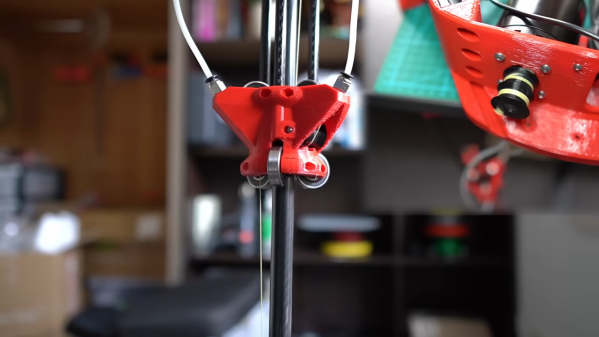
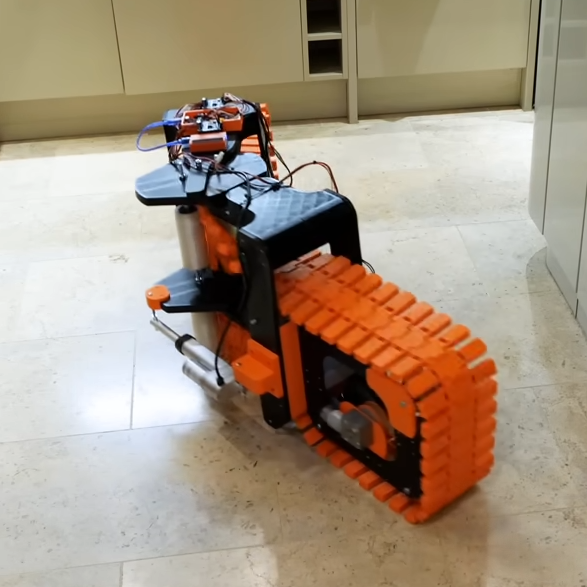
He’s since modified the design to a single-track, and added a flex point in the center of the body. Two linear actuators work together to make the vehicle bend, and therefore give it the ability to steer and turn. A normal tread would be unable to bend in this way, but the twist in the Möbius tread accommodates this pivot point perfectly well.
It works, but it’s not exactly an ideal vehicle. With the tread doing a 90-degree twist on the bottom, there isn’t a lot of ground clearance. In addition, since the long vehicle has only a single tread, it is much taller than it is wide. Neither does it any real favors when it comes to stability over uneven terrain, but it’s sure neat to try.
Even if it’s not practical, Möbius Tank is wild to look at. Check it out in the video, embedded just under the page break.