[Martin Roberts] wrote to us, telling us about a build that his company, [Ocean View Workshop], was tasked with. Creating a four meter wide window able to open vertically is no small feat, and it had to be custom-built because the local company building such windows wasn’t comfortable working with anything other than aluminum — insufficient for the window’s scale. With massive weight of the glass alone, structural requirements for supporting it, and the mechanical loads to be applied, some careful planning was in order.
To start with, this window had to be motorized, as an average person wouldn’t be capable of pulling it upwards. Not satisfied with the linear actuator choice available, they went to a hardware store and found some swing gate actuators that, in workshop tests, proved themselves to be more than capable of handling way over the weight required. In fact, they were capable of lifting [Martin] himself off the ground without much hassle.
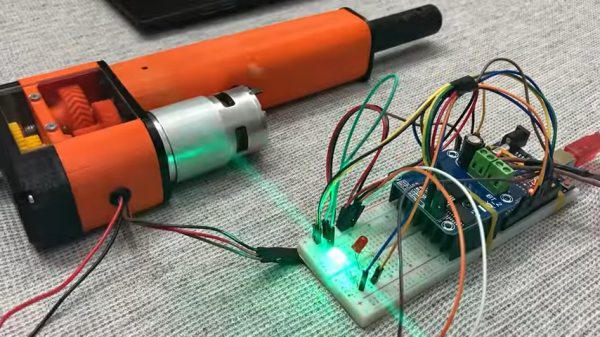
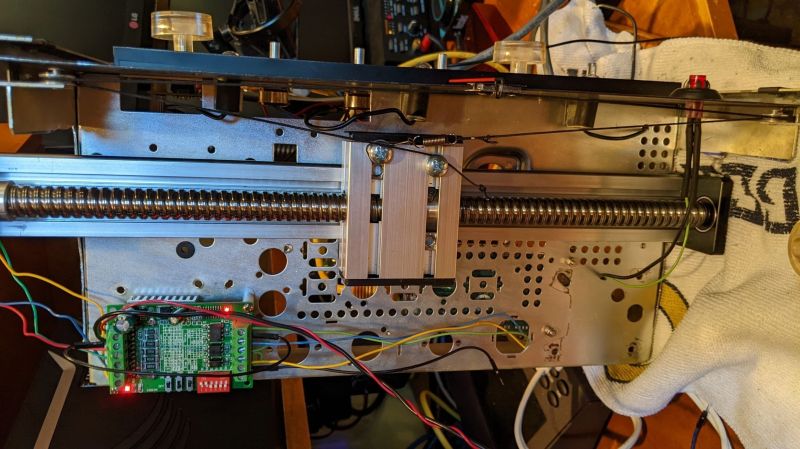
The design relies on a carriage that moves along a threaded rod, perhaps the most rudimentary design of linear actuator. A large brushed DC motor is used to turn the threaded rod through a 3D-printed 9:1 herringbone geartrain, shifting the actuator back and forth. End stop switches are used to disengage the motor to avoid damage to the mechanism. Feedback is via a ten-turn potentiometer driven off the output geartrain to match the range of the actuator to the rotational range of the pot.
The final build has a stroke of approximately 100 mm, and can lift and hold a 15 kg weight with ease. In a pull test, the actuator failed at a load just shy of 100 kg. If you’re looking for something smaller, though, you can try building a linear actuator out of old DVD drive parts instead. Video after the break.
Faced with an old console stereo from the 1960s that was barely functional, [Sherman Banks] aka W4ATL decided to upgrade its guts while keeping its appearance as close to the original as possible. This stereo set is a piece of mahogany furniture containing an AM/FM stereo receiver and an automatic turntable from JCPenny’s Penncrest line. As best [Sherman] can determine, it is most likely a 1965 model. The old electronics were getting more and more difficult to repair and the tuner was drifting off-station every 15 minutes. He didn’t want to throw it away, so he decided to replace all the innards.
The first thing was to tear out the old electronics while retaining the chassis proper. The new heart of the entertainment center is a modern Denon AV stereo receiver. This unit can be controlled over Ethernet, has a radio tuner, inputs for SiriusXM and a turntable, and supports Bluetooth streaming. [Sherman] next replaced the 1965 turntable, and then turned his attention to connecting up the controls and indicators.
The potentiometers were replaced with equivalent ones of lower resistance, the neon stereo indicator was replaced with an LED, but the linear tuning dial proved to be a nearly two month challenge and resulted in a cool hack. In brief, he connected an optical rotary encoder to the tuning knob and used a stepper motor with a linear actuator to control the dial indicator. All this is controlled from an Arduino Mega 2560 with three shields for I/O and LAN. But there was still one remaining issue — without vacuum tubes to warm up, the radio would play immediately after power-on. [Sherman] fixed that by programming the Arduino to slowly ramp up the volume at the same rate as the original tube receiver. And finally, he installs a small HDMI monitor in the corner to display auxiliary information and metadata from the Denon receiver.
For many years now a source for some of the smallest and cheapest home made CNC mechanisms has been the seemingly never-ending supply of surplus CD and DVD-ROM drives. The linear actuator that moves the laser may not be the longest or the strongest, but it’s free, and we’ve seen plenty of little X-Y tables using CD drives. It’s these mechanisms that [Nemo404] has taken a little further, freeing the lead screw and motor from the drive chassis and placing them in a 3D-printed enclosure for a complete linear actuator that can be used in other projects. (Video, embedded below.)
There seems to be no positional feedback, not even the limit switch that would grace a typical CD drive, but aside from that it makes for a compact unit. There are two versions, one for a linear bearing and the other for the brass bushes found in CD drives. It’s unclear how strong the result is, but it appears to be strong enough to demonstrate lifting a small container of screws.
It should be said that, at least technically, the Husqvarna TS 348XD in question was still working. It’s just that [xxbiohazrdxx] noticed the locking differential, which is key to maintaining traction on hilly terrain, didn’t seem to be doing anything when the switch was pressed. Since manually moving the engagement lever on the transmission locked up the differential as expected, the culprit was likely in the electronics.
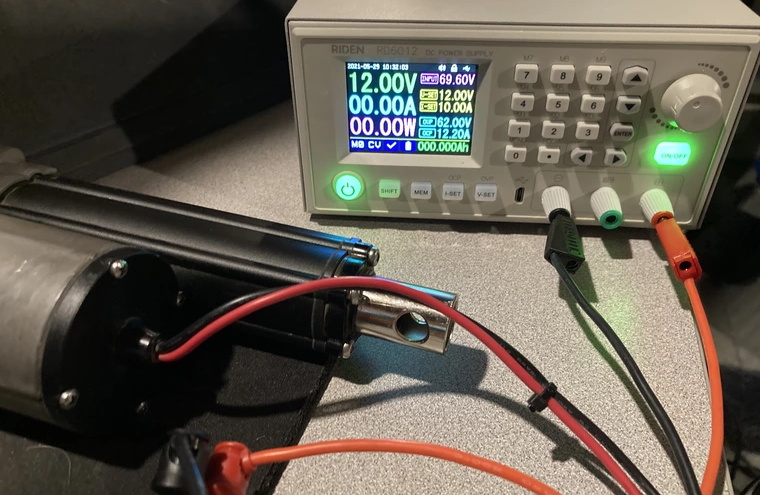
Testing the dead actuator.
As [xxbiohazrdxx] explains, the switch on the dash is connected to a linear actuator that moves the lever on the transmission. The wiring and switch tested fine with a multimeter, but when the actuator was hooked up to a bench power supply, it didn’t move. Even more telling, it wasn’t drawing any power. Definitely not a good sign. Installing a new actuator would have solved the problem, but it was an expensive part that would take time to arrive.
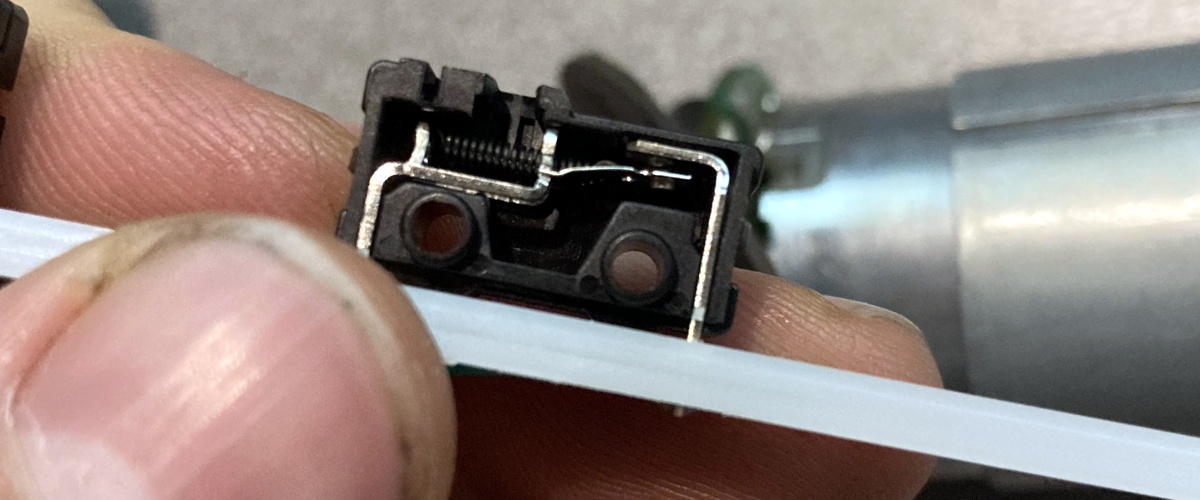
Repairing the dead actuator seemed worth a shot at least, so [xxbiohazrdxx] cracked it open. The PCB looked good, and there were no obviously toasted components. But when one of the internal microswitches used to limit the travel of the actuator was found to be jammed in, everything started to make sense. With the switch locked in the closed position, the actuator believed it was already fully extended and wouldn’t move. After opening the switch itself and bending the contacts back into their appropriate position, everything worked as expected.
A tiny piece of bent metal kept this $4,000 machine from operating correctly.
As interesting as this step-by-step repair process was, what struck us the most is [xxbiohazrdxx]’s determination to fix rather than replace. At several points it would have been much easier to just swap out a broken part for a new one, but instead, the suspect part was carefully examined and coaxed back to life with the tools and materials on-hand.
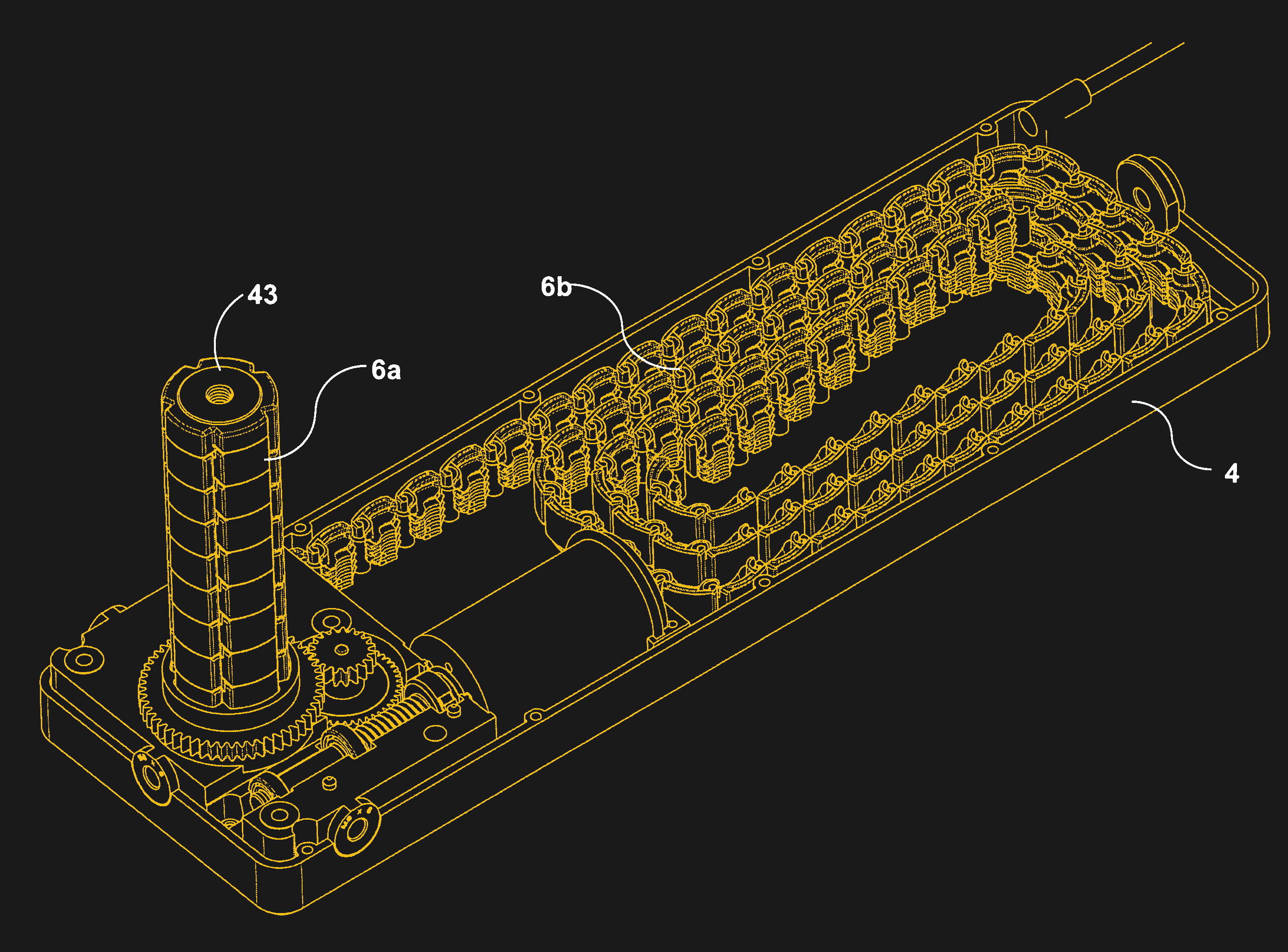
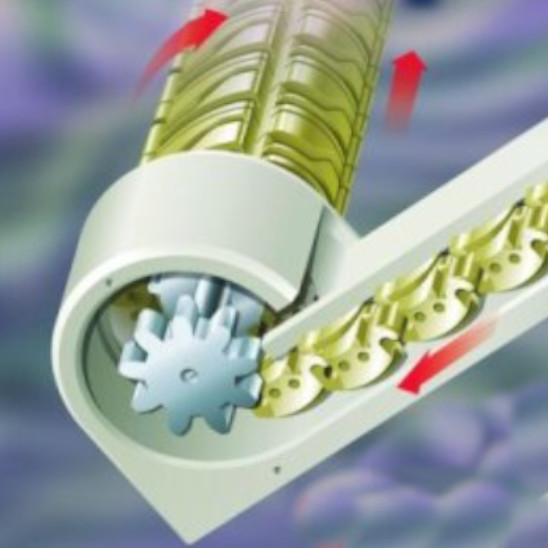
The device, trademarked as the Kataka but generically referred to as a Segmented Spindle, is a compact form of linear actuator that uses a novel belt arrangement to create a device that can reduce to a very small thickness, while crowing to seemingly impossible dimensions when fully extended. This is the key advantage over conventional actuators, which usually retract into a housing of at least the length of the piston.
It’s somewhat magical to watch the device in action, seeing the piston appear “out of nowhere”. Kataka’s youtube channel is now sadly inactive, but contains many videos of the device used in various scenarios, such as lifting chairs and cupboards. We’re impressed with the amount of load the device can support. When used in scissor lifts, it also offers the unique advantage of a flat force/torque curve.
Most records of the device online are roughly a decade old. Though numerous prototypes were made, and a patent was issued, it seems the mechanism never took off or saw mainstream use. We wonder if, with more recognition and the advent of 3D printing, we might see the design crop up in the odd maker project.
Dishwashers are great at washing dishes and even rinsing them, most of the time. Where they tend to fail is in the drying part. Somehow these things dry hot enough to warp stoneware dishes, but not so well that things are actually dry when you open the door. Blame it on the lack of air movement.
[Ivan Stepaniuk] is listening for the dishwasher’s frequencies with a microphone, amplifying them with a trusty LM386, and using an STM32 blue pill to crunch the audio. [Ivan] has plans to incorporate an ESP8266 board for IoT, presumably to get a notification when the door has been opened successfully. Check out the demo after the break.