Unless your computer is pretty old, it probably uses UEFI (Unified Extensible Firmware Interface) to boot. The idea is that a bootloader picks up files from an EFI partition and uses them to start your operating system. If you use Windows, you get Windows. If you use Linux, there’s a good chance you’ll use Grub which may or may not show you a menu. The problem with Grub is you have to do a lot of configuration to get it to do different things. Granted, distros like Ubuntu have tools that go through and do much of the work for you and if you are satisfied with that, there’s no harm in using Grub to boot and manage multiple operating systems.
An alternative would be rEFInd, which is a nice modern UEFI boot manager. If you are still booting through normal (legacy) BIOS, the installation might be a hassle. But, in general, rEFInd, once installed, just automatically picks up most things, including Windows, Mac, and Linux operating systems and kernels. The biggest reasons you might change the configuration is if you want to hide some things you don’t care about or change the visual theme.


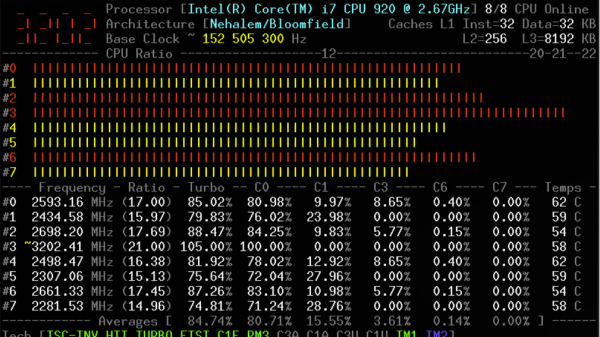
 The tool relies on a kernel module, and is coded primarily in C, with some assembly code used to measure performance as accurately as possible. It’s capable of reporting everything from core frequencies to details on hyper-threading and turbo boost operation. Other performance reports include information on instructions per cycle or instructions per second, and of course, all the thermal monitoring data you could ask for. It all runs in the terminal, which helps keep overheads low.
The tool relies on a kernel module, and is coded primarily in C, with some assembly code used to measure performance as accurately as possible. It’s capable of reporting everything from core frequencies to details on hyper-threading and turbo boost operation. Other performance reports include information on instructions per cycle or instructions per second, and of course, all the thermal monitoring data you could ask for. It all runs in the terminal, which helps keep overheads low.