Just when you think the POV thing has run out of gas, along comes [mitxela] to liven things up. In this, he’s taken the whole persistence of vision display concept and literally spun up something very cool: a tiny volumetric “electric candle” display.
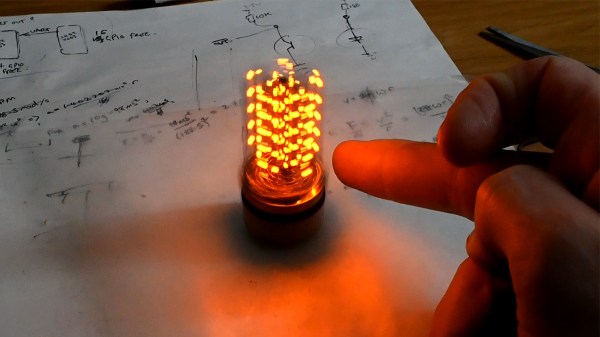
As he relates the story, the idea came upon him on a night out at the pub, which somehow led to the idea of an electric candle. Something on the scale of a tea light would fit [mitxela]’s fascination with very small and very interesting circuits, so it was off to the races. Everything needed — motor, LIR2450 coin cell, RP2040, and the vertical matrix of LEDs — fits into the footprint of the motor, which was salvaged from a CD drive. To avoid the necessity of finding or building a tiny slip-ring, he instead fixed everything to the back of the motor and attached its shaft to a Delrin baseplate.
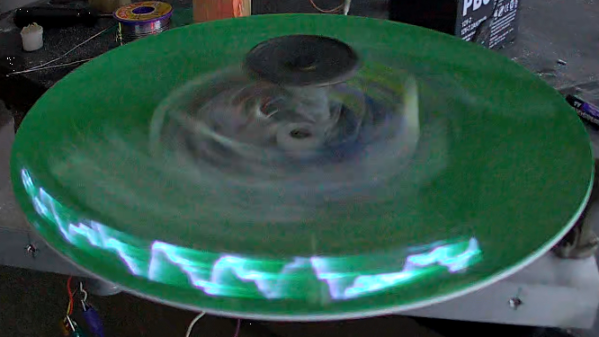
The 8×10 array of surface-mount LEDs stands atop the RP2040 with the help of some enameled magnet wire, itself a minor bit of circuit sculpture. There’s also a 3D-printed holder for a phototransistor and IR LED, which form a sensor to trigger the display; you can see [mitxela] using a finger to turn the display off and move it back and forth. It goes without saying that these things always look better in person than they do in stills or even on video, but we still think it looks fantastic. There’s also a deep dive into generating volumetric data in the write-up, as well as an unexpected foray into the fluid dynamics calculations needed to create a realistic flame effect for the candle.
All in all, this is a fantastic if somewhat fragile project. We love the idea of putting this in a glass enclosure to make it look a little like a Nixie tube, too.
Continue reading “Tiny POV Turns Right Round For Volumetric Fun”