People go missing without a trace far more commonly than any of us would like to think about. Of course the authorities will conduct a search, but even assuming they have the equipment and personnel necessary, the odds are often stacked against them. A few weeks go by, then months, and eventually there’s yet another “cold case” on the books and a family is left desperate for closure.
But occasionally a small team or an individual, if determined enough, can solve such a case even when the authorities have failed. Some of these people, such as [Antti Suanto] and his brother, have even managed to close the books on multiple missing person cases. In an incredibly engrossing series of blog posts, [Antti] describes how he hacked together a pair of remotely operated vehicles to help search for and ultimately identify sunken cars.
If you want to build your own rover, there’s plenty of cheap RC trucks out there that will provide a serviceable chassis to work with. Looking to go airborne with a custom drone? Thanks to the immense popularity of first-person view (FPV) flying, you’ll find a nearly infinite variety of affordable fixed wing and quadcopter platforms out there to chose from. But when it comes to robotic watercraft, the turn-key options aren’t nearly as plentiful; the toys are all too small, and the commercial options are priced for entities that have an R&D budget to burn. For amateur aquatic explorers, creativity is the name of the game.
Take for example this impressive vessel built by [wesgood]. With a 3D printed electronics enclosure mounted to a pair of pontoons made of cheap 4-inch PVC pipe available from the hardware store, it provides a stable platform without breaking the bank. Commercial jet drive units built into the printed tail caps for the pipes provide propulsion, and allow the craft to be steered through differential thrust. Without rudders or exposed propellers, this design is particularly well-suited for operating in shallow waters.
A removable electronics tray allows for easy access.
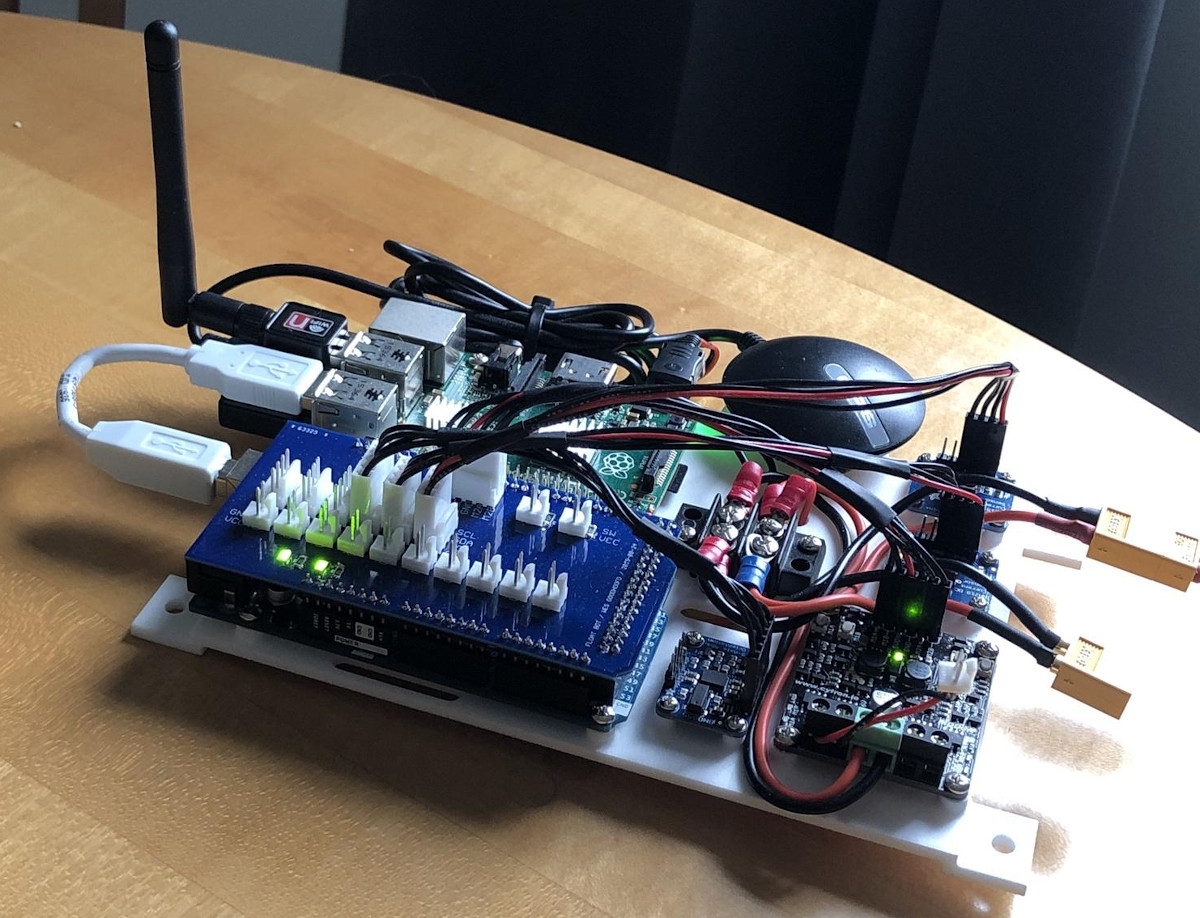
Perched high above the water, the electronics box contains a Raspberry Pi 2, BU353 USB GPS receiver, and a Arduino Mega 2560 paired with a custom PCB that offers up convenient ports to connect a dual-channel Cytron 3 amp motor driver and Adafruit BNO055 9-DOF IMU. Power is provided by two 6,000 mAh LiPo batteries mounted low in the pontoons, and a matching pair of Adafruit current/voltage sensors are used to keep track of the energy budget. A small USB WiFi dongle with an external antenna plugged into the Pi offers up a WiFi network that [wesgood] can connect to with an iPad for control.
If the control software for the craft looks particularly well-polished, it’s probably because [wesgood] just so happens to be a professional developer with a focus on mobile applications. While we’re a bit skeptical of using WiFi for a critical long-distance link, we can’t deny that the iPad allows for a very slick interface. In addition to showing the status of the craft’s various systems, it lets the user either take manual control or place waypoints for autonomous navigation — although it sounds like that last feature is only partially implemented right now.
Kayaks are a some of the most versatile watercraft around. You can fish from them, go on backpacking trips, or just cruise around your local lake for a few hours. They’re inexpensive, lightweight, don’t require fuel, and typically don’t require a license or insurance to operate. They also make a great platform for a solar-powered boat like this one with only 150 watts of panels and a custom-built motor with parts from an RC airplane.
[William Frasier] built his solar-powered kayak using three solar panels, two mounted across the bow of the boat using pontoons to keep them from dipping into the water, and the other mounted aft. Separating the panels like this helps to prevent all three of them being shaded at once when passing under bridges. They’re all wired in parallel to a 12V custom-built motor which is an accomplishment in itself. It uses custom-turned parts from teak, a rot-resistant wood, is housed in an aluminum enclosure, and uses an RC airplane propeller for propulsion.
Without using the paddles and under full sun, the kayak can propel itself at about 4 knots (7 kmh) which is comparable to a kayak being propelled by a human with a paddle. With a battery, some of the shading problems could be eliminated, and adding an autopilot to it would make it almost 100% autonomous.
New York City’s L train carries about 400,000 passengers a day, linking Manhattan and Brooklyn and bringing passengers along 14th Street, under the East River, and through the neighborhoods of Williamsburg, Bushwick, Ridgewood, Brownsville, and Canarsie. About 225,000 of these passengers pass through the Canarsie Tunnel, a two-tube cast iron rail tunnel built below the East River between Manhattan and Brooklyn in 1924. Like many other New York City road and subway tunnels, the Canarsie Tunnel was badly damaged when Hurricane Sandy’s storm surge inundated the tubes with million of gallons of salt water. Six years later, the impending closure of the tunnel is motivating New Yorkers to develop their own ambitious infrastructure ideas.
This Lego watercraft uses drinking bottles as pontoons arranged in a pattern that make it look very much like a Water Strider, the insects that dance on the surface of a lake.
After the break you can see a video of the rig gracefully navigating a local pond, along with a raft of ducks. It’s quiet enough not to startle them, which is nice. We don’t get a good look at the propulsion system, but [Vimal Patel] calls the floats “hockey bottles” in his Flickr comments. They appear to be Lego themed and we’re wondering if they are some type of packaging for a small set that doubles as a sports drinking bottle once the pieces are removed? The rig includes a camera which provides a great persepcive very near the water level.
This isn’t his only floating creation. He’s got a second rig that was used to film some of the footage of this one.
[Kevin Sandom] built this boat using a radio controlled toy car. The two pontoons are recycled from Styrofoam packaging material using some thick wire to connect them and provide a framework for the propulsion and control circuitry. The motor itself is a hobby outboard, which really only required [Kevin] to develop a method for steering. He walks us through the build process in the video after the break, where we find out that the original toy has a pretty bad design flaw. It seems the car used four AA batteries to drive the motor, but one of the four batteries was also used separately from the other three to power the control circuitry. Running that battery down faster than the others shortens the life of the whole.
This is considerably easier than the underwater ROV hacks we’ve seen before. We do think that it would make for a fun weekend project, and we’d bet you’ll get some weird looks for piloting what appears to be garbage around a pond.
[Mark’s] system starts by adding outriggers to a kayak to prevent the possibility of the boat rolling over in the water. Each pontoon has an electric trolling motor attached to it that is controlled by an Arduino via a motor driver.
The Arduino takes navigational commands from a sip & puff controller. A straw in the operator’s mouth allows them to sip or puff for a split second to turn left or right. Longer sips or puffs control forward and reverse incrementally, up to a top speed of about 3.7 miles per hour. [Mark] incorporated an auxiliary remote control interface so that a safety observer can take control of navigation if necessary.