Industrial robot arms are curious devices, found everywhere from the back of old engineering classrooms where they taught kinematics in the 90s, to the factory floor where they do the same thing over and over again while contemplating their existence. For his Hackaday Prize entry, [Dan] is building a big robot arm. It’s not big enough to ride on, but it is large enough to automate a few processes in a reasonably well-equipped lab.
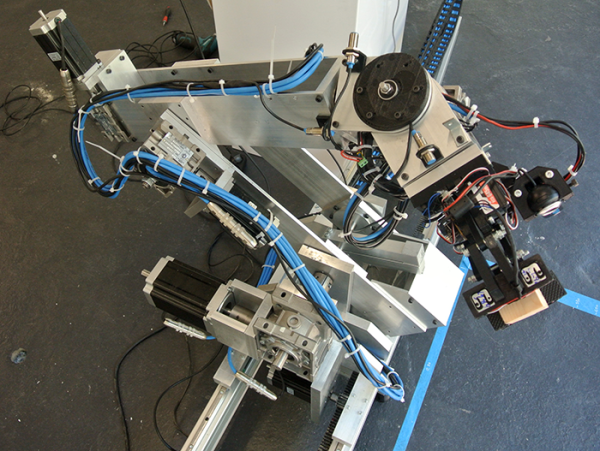
This is not a tiny robotic arm powered by 9 gram hobby servos. For the bicep and tricep of [Dan]’s arm, he’s using linear actuators – they’re high precision and powerful. A few months ago, [Dan] tried to design a hypocycloid gear but couldn’t get a $3000 prototype to work. Although the hypocycloid is out, he did manage to build a strange differential pan/roll mechanism for the wrist of the arm. It really is a thing of beauty, and with the engineering [Dan] has put into it, it’s a very useful tool.
If you’d like to meet [Dan]’s robot arm in person, he’ll be at the 2015 NYC Maker Faire this weekend. Check out [Dan]’s Hackaday Prize video for his robot arm below.
Continue reading “Hackaday Prize Semifinalist: An Affordable Robotic Arm”
 When you think of a robotic arm, you’re probably thinking about digital control, microcontrollers, motor drivers, and possibly a feedback loop. Anyone who was lucky enough to have an Armatron knows this isn’t the case, but you’d still be surprised
When you think of a robotic arm, you’re probably thinking about digital control, microcontrollers, motor drivers, and possibly a feedback loop. Anyone who was lucky enough to have an Armatron knows this isn’t the case, but you’d still be surprised