Monorails aren’t just the core reason why The Simpsons remains on air after thirty-six seasons, twenty-six of which are unredeemable garbage. They’re also an interesting example of oddball rail travel which has never really caught on beyond the odd gadgetbahn project here and there. [Hyperspace Pirate] recently decided to investigate the most interesting kind of monorail of all—the gyro stabilized type—on a small scale for our viewing pleasure.
The idea of a gyro-stabilized monorail is to use active stability systems to allow a train to balance on a single very thin rail. The benefits of this are questionable; one ends up with an incredibly expensive and complex rail vehicle that must always run perfectly or else it will tip over. However, it is charming to watch in action.
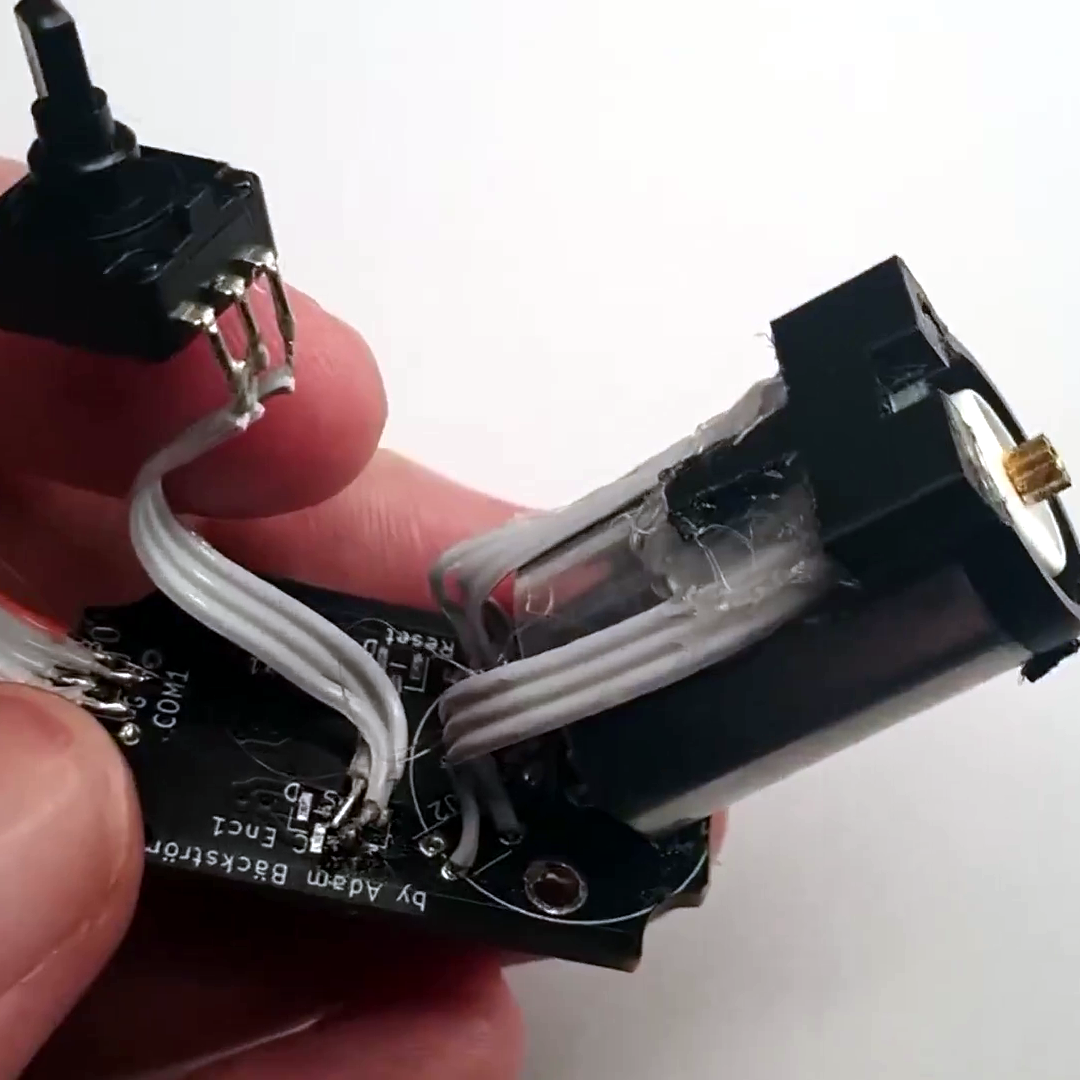
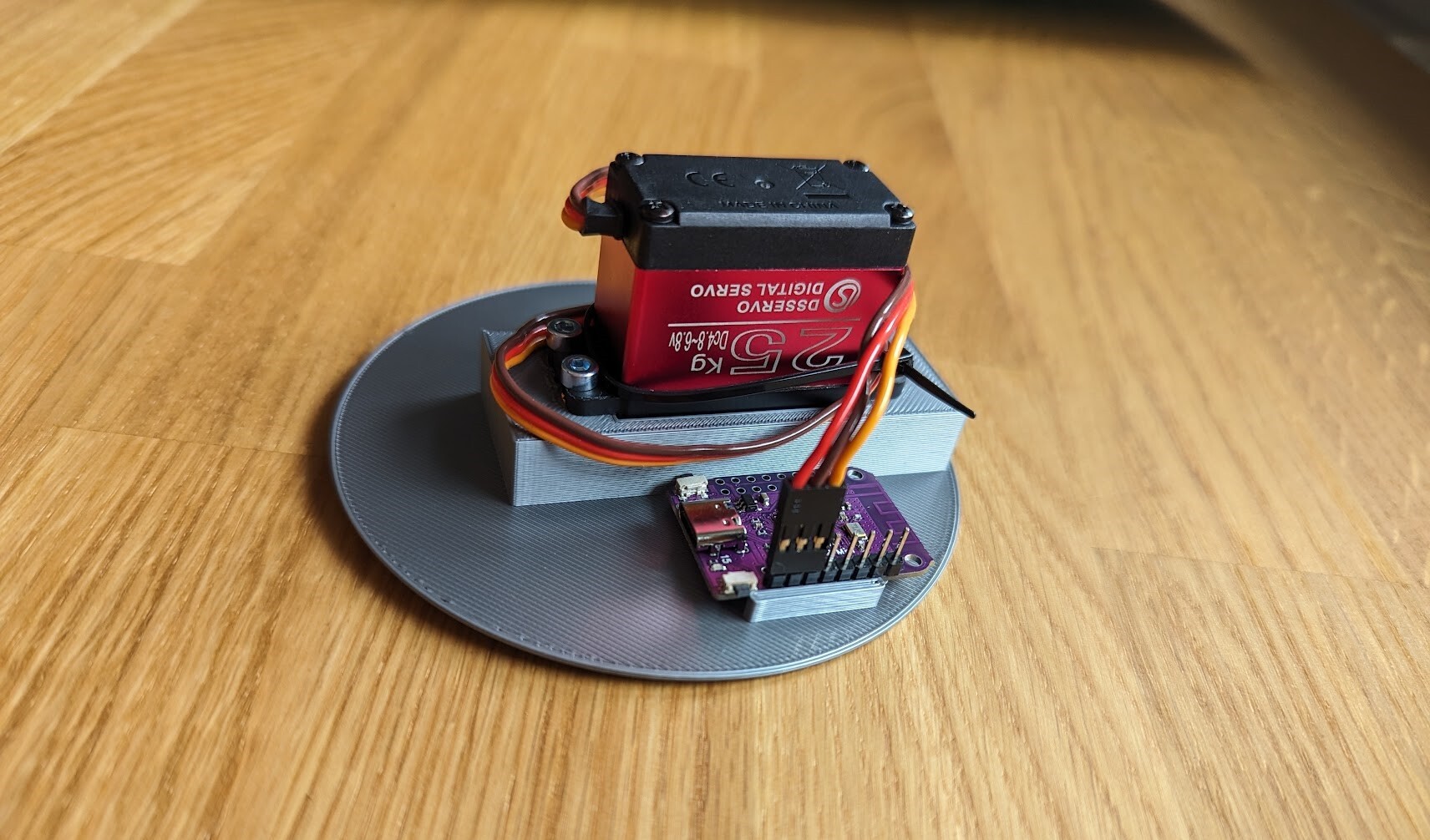
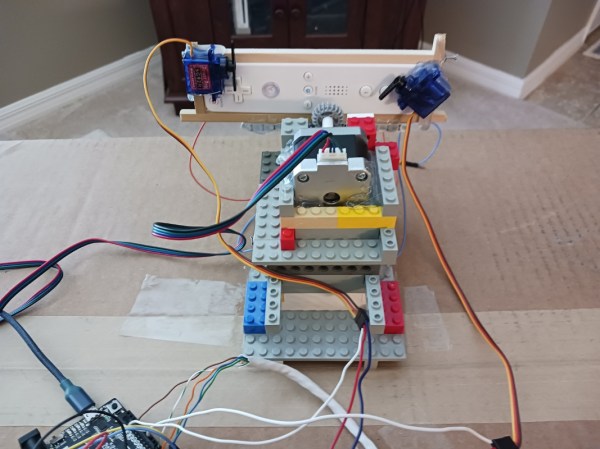
[Hyperspace Pirate] explains how the monorail vehicle uses control moment gyroscopes to keep itself upright. The video also explains the more common concept of reaction wheels so the two systems can be contrasted and compared. It all culminates in a wonderful practical demonstration with a small 3D printed version of a 20th-century gyro monorail running on a 24″ track.
If you’re studying mechanical engineering this is a great project to pore over to see theoretical principles put into obvious practice. Video after the break.
Continue reading “Building A Small Gyro Stabilized Monorail”