Rather than chasing pure performance and high quality graphics like other gaming companies, Nintendo has made a name for themselves over the last few decades by favoring not only artistic design and gameplay, but the physical design of the game systems. Of course the hybrid handheld Switch console is among these, but it also includes things like the novel design of the Nintendo 64 controller and, of course, the Wii nunchuck controllers. They’re not always met with resounding approval, though. Some of us tend to prefer more traditional gamepad design, and will go to extreme lengths to get it like this D-pad for playing Mario Kart Wii.
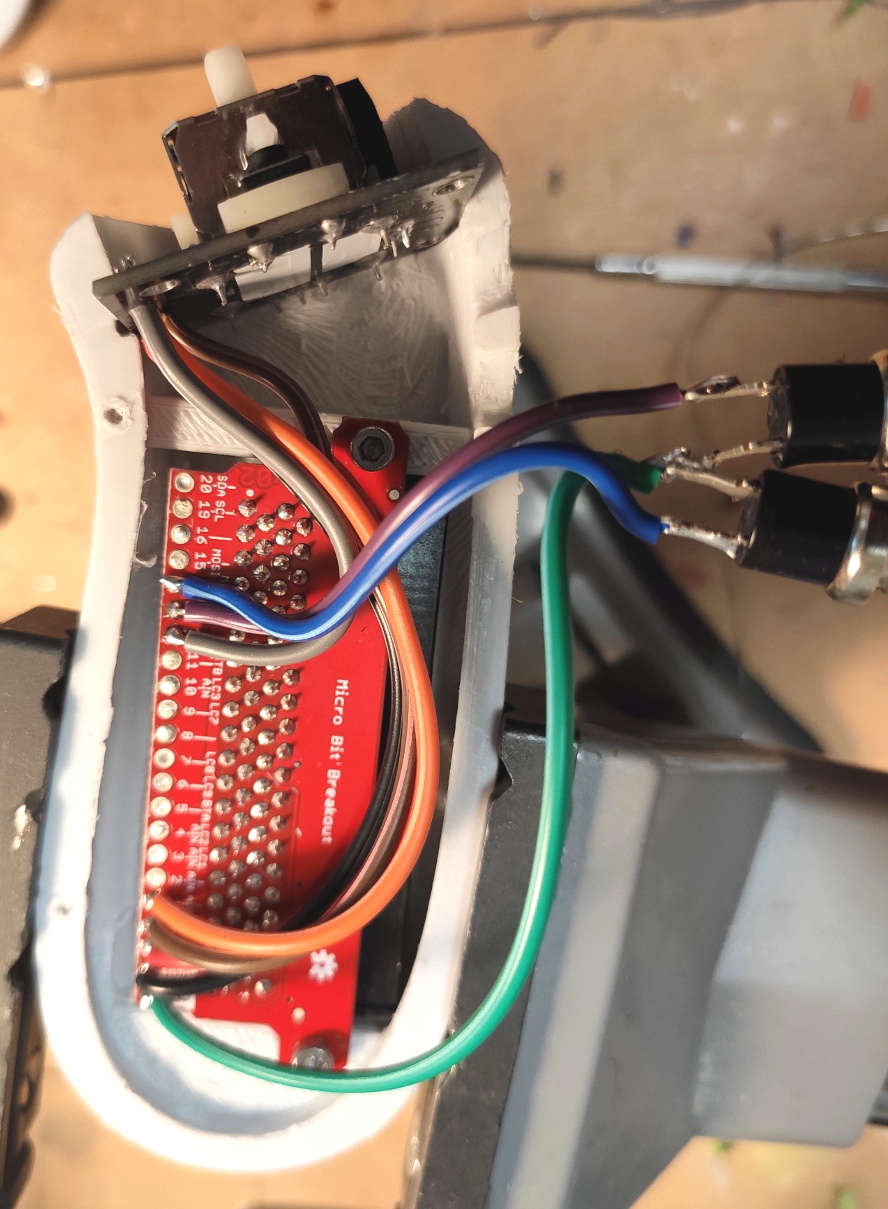
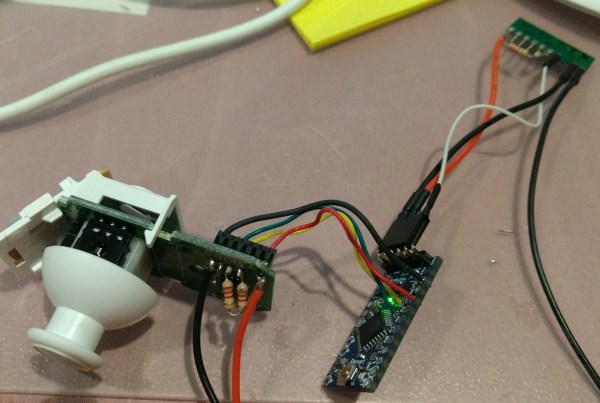
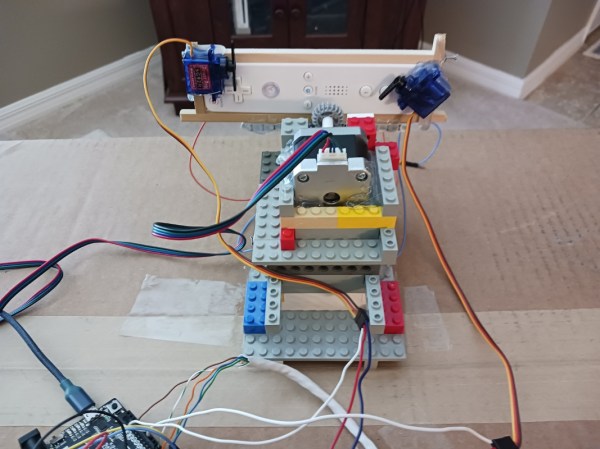
Rather than simply building a compatible controller for the Wii, or even using a GameCube controller, this controller setup takes a more roundabout approach. A Wiimote is placed in a holster built from Lego, and the game is set up to recognize it as if it were being used in its steering wheel mode. The Lego holster has a servo attached which can tilt the Wiimote from side to side, mimicking a player holding it to play the game, with another set of servos set up to press the various buttons. To control the controller, a homebrew D-pad built on perfboard with an Arduino at its core is used to send commands to the servos, allowing for a more standard controller layout to be used for the classic kart racing game than the steering wheel Wiimote allows.
While it’s quite obvious that there are simpler, easier solutions that avoid the sometimes awkward nature of using Wiimotes, we certainly appreciate the Rube Goldberg-like approach to setting up your gaming experience exactly the way you like. Whether that’s setting up an antique CRT effect for the authentic retro gaming experience or building a complete racing simulator from scratch, the gaming experience is ripe for personalization and unique builds like this one.