For many people, a retrocomputer is a classic machine from the past lovingly brought back to working order. But for some, the idea of a retrocomputer is wider than that, encompassing modern hardware that delivers to feel like a device from the past.
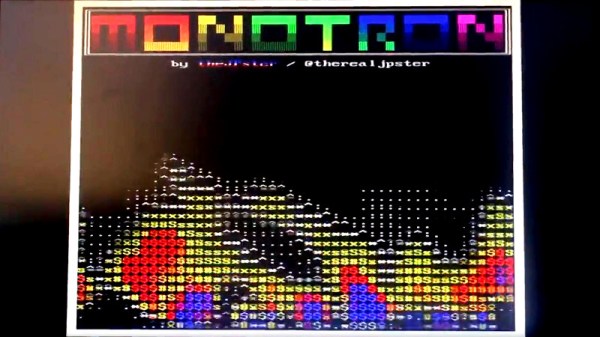
The Monotron from [Jonathan Pallant] is one such computer. It’s definitely a retrocomputer such as you might have found in the 1980s, but it’s running on a much more modern Tiva-C TI Launchpad dev board sporting an ARM Cortex M4.
The platform has been created entirely in Rust, and emulates what would have been a rather desirable machine in the early 1980s. With an 800×600 pixel 8-colour VGA display interface, 32k of RAM, and mono 8-bit audio, it already has a few simple demos and games running upon it. [Jonathan Pallant] has given more than one talk on its design and capabilities, we’ve placed one of them as a video below the break. There is even a PCB available which adds all the ports as well as a micro SD card slot for program storage.
We like the Monotron, and we look forward to seeing it develop. It’s an exciting time for retrocomputig with projects such as the RC2014 Z80 machine and the Gigatron TTL RISC processor, but is there space for an emulated one such as this? We hope so.