Deep in the bowels of the Digikey and Mouser databases, you’ll find the coolest component ever. Motorized linear potentiometers are a rare, exotic, and just plain neat input device most commonly found on gigantic audio mixing boards and other equipment that costs as much as a car. They’re slider potentiometers with a trick up their sleeve: there’s a motor inside that can set the slider to any position.
The mechanical keyboard community has been pushing the boundaries of input devices for the last few years, and it looks like they just discovered motorized linear pots. [Jack] created a motorized sliding keycap for his keyboard. It’s like a scroll wheel, but for a keyboard. It’s beautiful, functional, and awesome.
The hardware for this build is just about what you would expect. A 60 mm motorized linear pot for the side-mount, or 100 mm mounted to the top of the keyboard, is controlled by an Arduino clone and a small motor driver. That’s just the hardware; the real trick here is the software. So far, [Jack] has implemented a plugin system, configuration software, and force feedback. Now, messing with the timeline in any Adobe product is easy and intuitive. This device also has a ‘not quite vibration’ mode for whenever [Jack] gets a notification on his desktop.
Right now, [Jack] is running a group buy for this in a reddit thread, with the cost somewhere between $55 and $75, depending on how many people want one. This is a really awesome product, and we can’t wait for Corsair to come out with a version sporting innumerable RGB LEDs. Until then, we’ll just have to drool over the video [Jack] posted below.
Continue reading “Wherein The Mechanical Keyboard Community Discovers Motorized Linear Potentiometers” →






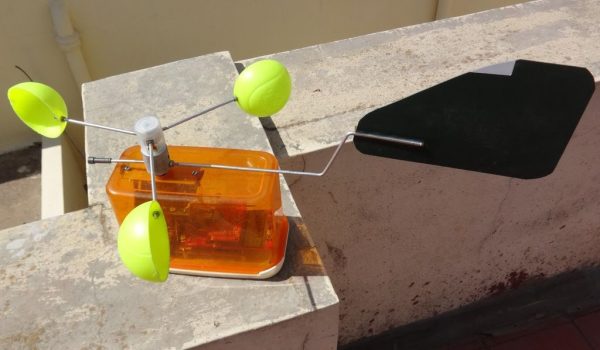
 We have to admit that when we first saw [Ajoy Raman]’s Instructables post, we figured that he used a universal motor to generate a voltage from the anemometer. But [Ajoy]’s solution to the coaxial shafts problem is far more interesting than that. A discarded universal motor donated its rotor and bearings. The windings were stripped off the assembly leaving nothing but the commutator. 1kΩ SMD resistors were soldered across adjacent commutator sections to form a series resistance of 22kΩ with taps every 1k, allowing 0 to 2.2V to be read to the ADC of a microcontroller depending on the angle of the vane.
We have to admit that when we first saw [Ajoy Raman]’s Instructables post, we figured that he used a universal motor to generate a voltage from the anemometer. But [Ajoy]’s solution to the coaxial shafts problem is far more interesting than that. A discarded universal motor donated its rotor and bearings. The windings were stripped off the assembly leaving nothing but the commutator. 1kΩ SMD resistors were soldered across adjacent commutator sections to form a series resistance of 22kΩ with taps every 1k, allowing 0 to 2.2V to be read to the ADC of a microcontroller depending on the angle of the vane.