[Curious Droid] is back with a history lesson on one of the most important inventions of the 20th century: The cavity magnetron. Forged in the fighting of World War II, the cavity magnetron was the heart of radar signals used to identify attacking German forces.
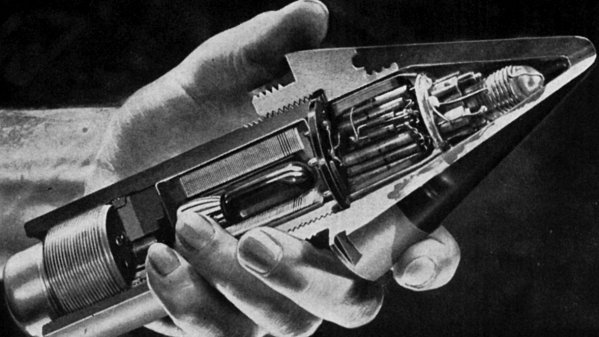
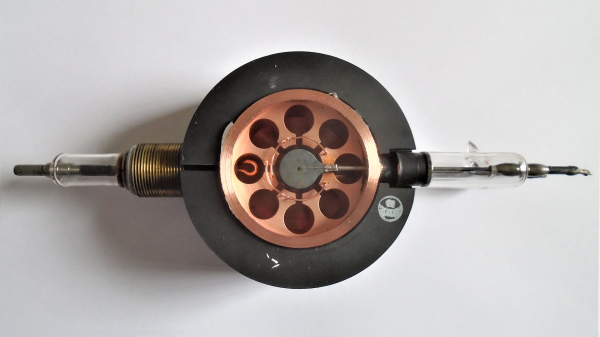
The magnetron itself was truly an international effort, with scientists from many countries providing scientific advances. The real breakthrough came with the work of [John Randall] and [Harry Boot], who produced the first working prototype of a cavity magnetron. The device was different than the patented klystron, or even earlier magnetron designs. The cavity magnetron uses physical cavities and a magnetic field to create microwave energy. The frequency is determined by the size and shape of the cavities.
While the cavity magnetron had been proven to work, England was strapped by the war effort and did not have the resources to continue the work. [Henry Tizzard] brought the last prototype to the USA where it was described as “the most valuable cargo ever brought to our shores”. The cavity magnetron went on to be used throughout the war in RADAR systems both air and sea.
Today, many military RADAR systems use klystrons or traveling wave tube amplifiers due to requirements for accurate frequency pulses. But the cavity magnetron still can be found in general and commercial aviation RADAR systems, as well as the microwave ovens we all know and love.
Check the video out after the break.
Continue reading “The Device That Won WW2: A History Of The Cavity Magnetron”