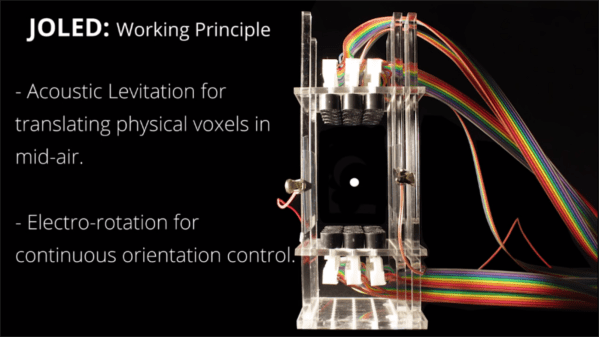
Flip-Dot displays are so awesome that they’re making a comeback. But awesome is nothing when you can have an insane flip-dot display that is three-dimensional with the dots floating in mid-air. Researchers at the Universities of Sussex and Bristol have built what they call JOLED, an array of floating pixels that can be controlled via a combination of ultrasonic standing waves and an electrostatic field. These “voxels” can be individually moved in space via ultrasonics, and can also be individually flipped or rotated through any angle, via the electrostatic field.
The key to the whole thing is something they call Janus Objects – hence JOLED. Janus particles have different features or chemistry on two opposite sides. A portion of each voxel is speckled with a small amount of titanium dioxide nano powder. This gives it a bipolar charge that makes it respond to the variable electrostatic field and hence capable of axial rotation. Half of each white voxel can then be covered with a contrasting color – red, blue, black – to achieve the flip dot effect. Each voxel appears to be a couple of millimeters in diameter. The ultrasonic actuators appear to be regular piezo transmitters found in every hacker’s parts bin. Transparent glass plates on opposite sides apply the variable electrostatic field.
While this is still experimental and confined to the research lab, future applications would be interesting. It would be like breaking e-ink displays out of their flat glass confines and giving them a third dimension. The short, two-minute video after the break does a good job of explaining what’s going on, so check it out. Now, who want’s to be the first to build a JOLED clock?
Thanks to [Garrow] for tipping us off about this.


 [Danjovic’s] implantation displays intervals and centivals, exactly what you would need to know the current time of day. He used a Microchip PIC16F628 running from a 4 MHz clock. time is displayed on seven segment LEDs. The PIC is programmed in C, using the classic version of Microchip’s own IDE: MPLAB 8.92. The code uses 297 program words. Since the ‘628 uses 14-bit instructions, that equates to just under 520 bytes. Perfect for the 1 kB challenge!
[Danjovic’s] implantation displays intervals and centivals, exactly what you would need to know the current time of day. He used a Microchip PIC16F628 running from a 4 MHz clock. time is displayed on seven segment LEDs. The PIC is programmed in C, using the classic version of Microchip’s own IDE: MPLAB 8.92. The code uses 297 program words. Since the ‘628 uses 14-bit instructions, that equates to just under 520 bytes. Perfect for the 1 kB challenge!