Designing and 3D-printing parts for a robot with a specific purpose is generally more efficient than producing one with a general functionality — and even then it can still take some time. What if you cut out two of those cumbersome dimensions and still produce a limited-yet-functional robot?
[Sebastian Risi] and his research team at the IT University of Copenhagen’s Robotics, Evolution, and Art Lab, have invented a means to produce wire-based robots. The process is not far removed from how industrial wire-bending machines churn out product, and the specialized nozzle is also able to affix the motors to the robot as it’s being produced so it’s immediately ready for testing.
A computer algorithm — once fed test requirements — continuously refines the robot’s design and is able to produce the next version in a quarter of an hour. There is also far less waste, as the wire can simply be straightened out and recycled for the next attempt. In the three presented tests, a pair of motors shimmy the robot on it’s way — be it along a pipe, wobbling around, or rolling about. Look at that wire go!
Continue reading “Wire-bots, Roll Out!” →




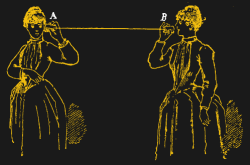 Did you ever make a tin can phone with a string when you were a kid? That dates back to at least 1667. Prior to the invention of what we think of as the telephone, these acoustic phones were actually used for specialized purposes.
Did you ever make a tin can phone with a string when you were a kid? That dates back to at least 1667. Prior to the invention of what we think of as the telephone, these acoustic phones were actually used for specialized purposes.








