A time domain reflectometer (TDR) is a useful tool to have for finding faults in a wiring harness. However, they don’t come cheap, putting them out of reach for many shadetree mechanics that like to work on their own cars. However, [László SZŐKE] has been exploring a neat way to build a similar device on the cheap.
Typically, time domain reflectometry involves shooting a short electric pulse down a wire, and listening for how long it takes to bounce back. The time depends on the length of the wire, so it can be used to determine the location of a break in conductivity. Unfortunately, these pulses move so fast that very fast, very expensive hardware is needed to make these measurements.
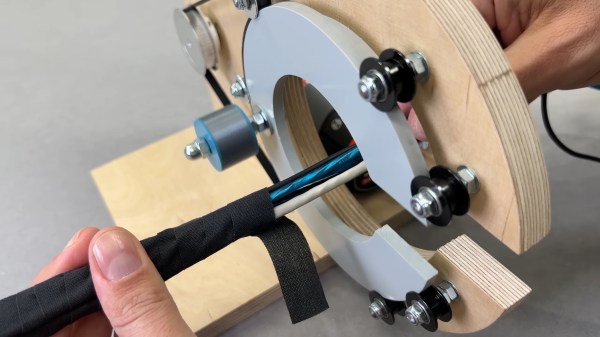
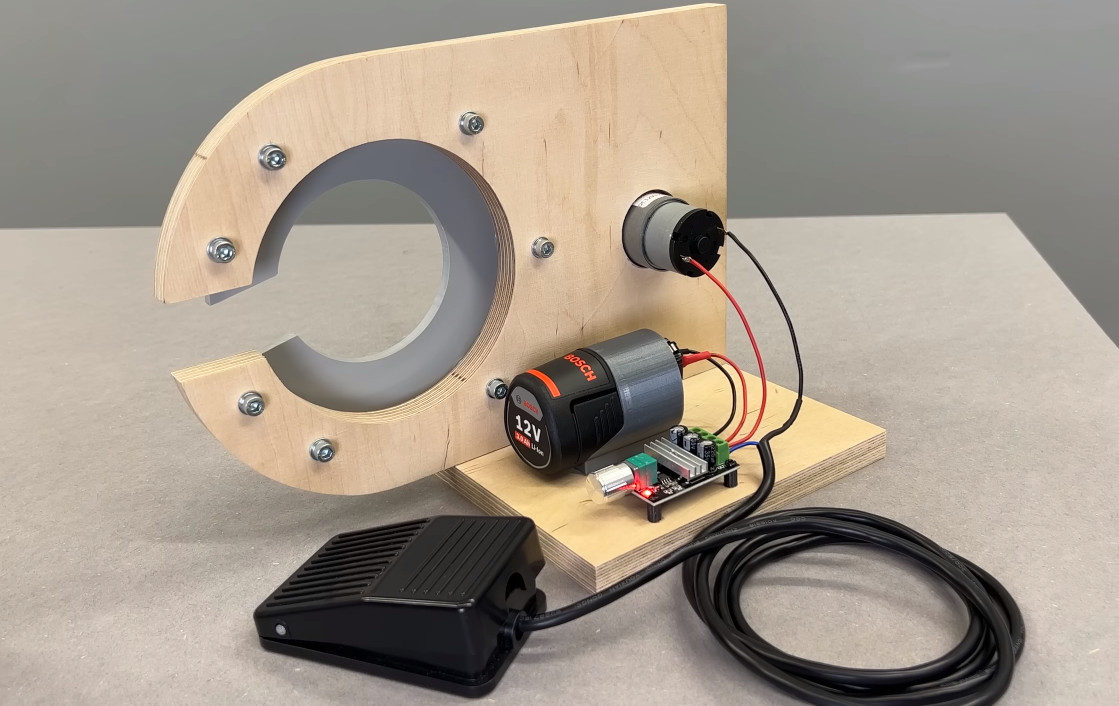
[László’s] technique relies on lower-tech hardware. Instead of sending a very short pulse down a wire, his rig uses a cheap C-Media USB audio device to send a 4 kHz or 8 kHz sine wave instead. Then, by listening to the reflection and measuring the phase shift, it’s possible to detect the distance to the end of the wire (or a break along its length). Some supporting hardware is required for protection’s sake, and to tune the setup for measuring shorter or longer cabling. However, with some smart software processing, [László] states that it’s possible to measure down to 1 cm resolution.
The idea is that this setup could prove particularly useful for automotive troubleshooting. If you measure a wire and the device reports a length of 30 cm, when you know the wire stretches several meters into the engine bay… you know there’s a break around 30 cm from your measurement point.
There’s still plenty of work to be done – for now, [László] is working on a new prototype that should have better performance when testing shorter cables. Still, we love to see this sort of out-of-the-box thinking put towards a common troubleshooting task. If you’re doing fun signal analysis work of your own, don’t hesitate to light up the tipsline.