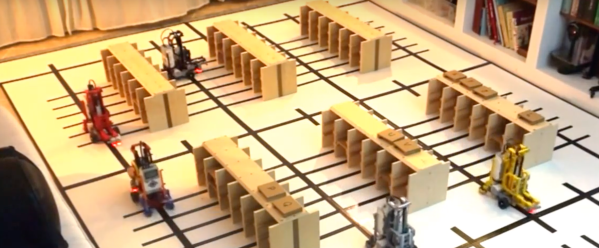
With every advance in robotics, we get closer to being able to order stuff from Amazon and have no human being participate in its delivery. Key step in this dream: warehouse robots, smart forklifts able to control and inventory and entire warehouse full of pallets, without the meat community getting involved. [Thomas Risager] designed just such a system as part of his Masters Thesis in Software Engineering. It consists of five LEGO Mindstorms robots working in concert (video embedded below), linked via WiFi to a central laptop. Mindstorms’ native OS doesn’t support WiFi (!!!) so he reflashed the EV3’s ARM9 chip with software developed using Java and running under LeJOS. On the laptop side [Thomas] wrote a C++ application that handles the coordination and routing of the forklifts. We can see a lot of weary forklift drivers ready to kick back and let a robot have the full-time job for a change.
The robots use WiFi to a central laptop. Mindstorms’ native OS doesn’t support WiFi (!!!) so [Thomas] reflashed the EV3’s ARM9 chip with software developed using Java and running under LeJOS. On the laptop side he wrote a C++ application that handles the coordination and routing of the forklifts. [Thomas] is sharing his forklift design.
Now to scale up — maybe with DIY forklifts like we published earlier? We can see a lot of weary forklift drivers ready to kick back and let a robot have the full-time job for a change.
Continue reading “Mindstorms Forkliftbots Gonna Take Your Job”

 He starts off by building a custom electro-mechanical clock movement, and since he’s planning as he progresses, meccano, breadboard and jumper wires were the way to go. Hot glue helps preserve sanity by keeping all the jumper wires in place. To interface with all of the peripherals in the clock, he decided to use a bank of shift registers driven from a regular Arduino Uno. The more expensive DS3231 RTC module ensures better accuracy compared to the cheaper DS1307 or similar clones. A bank of RGB LEDs acts as an annunciator panel inside the clock to help provide various status indications. The mechanical movement itself went through several iterations to get the time display working with a smooth movement of the hands. Besides displaying time, [David] also added a moon phase indicator dial. A five-rod chime is struck using a stepper motor driven cam and a separate solenoid is used to pull and release three chime hammers simultaneously to generate the loud gong sounds.
He starts off by building a custom electro-mechanical clock movement, and since he’s planning as he progresses, meccano, breadboard and jumper wires were the way to go. Hot glue helps preserve sanity by keeping all the jumper wires in place. To interface with all of the peripherals in the clock, he decided to use a bank of shift registers driven from a regular Arduino Uno. The more expensive DS3231 RTC module ensures better accuracy compared to the cheaper DS1307 or similar clones. A bank of RGB LEDs acts as an annunciator panel inside the clock to help provide various status indications. The mechanical movement itself went through several iterations to get the time display working with a smooth movement of the hands. Besides displaying time, [David] also added a moon phase indicator dial. A five-rod chime is struck using a stepper motor driven cam and a separate solenoid is used to pull and release three chime hammers simultaneously to generate the loud gong sounds.