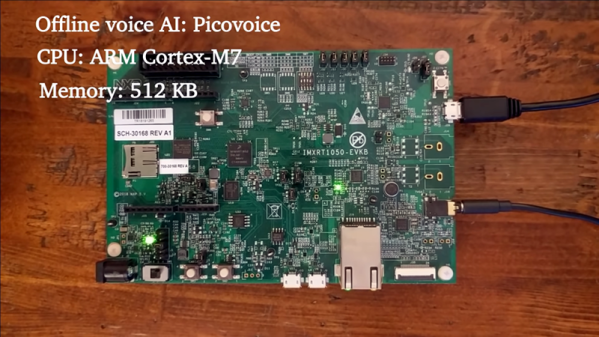
We live in the future. You can ask your personal assistant to turn on the lights, plan your commute, or set your thermostat. If they ever give Alexa sudo, she might be able to make a sandwich. However, you almost always see these devices sending data to some remote server in the sky to do the analysis and processing. There are some advantages to that, but it isn’t great for privacy as several recent news stories have pointed out. It also doesn’t work well when the network or those remote servers crash — another recent news story. But what’s the alternative? If Picovoice has its way, you’ll just do all the speech recognition offline.
Have a look at the video below. There’s an ARM board not too different from several we have lying around in the Hackaday bunker. It is listening for a wake-up phrase and processing audio commands. All in about 512K of memory. The libraries are apparently quite portable and the Linux and Raspberry Pi versions are already open source. The company says they will make other platforms available in upcoming releases and claim to support ARM Cortex-M, Cortex-A, Android, Mac, Windows, and WebAssembly.
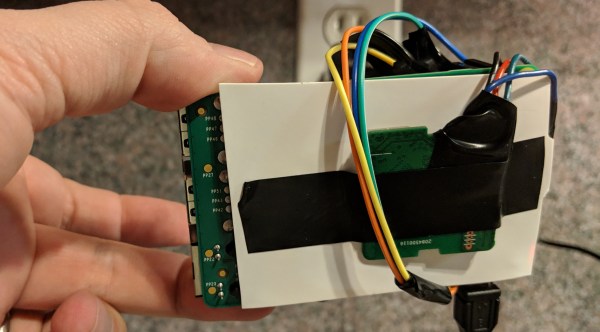
Feeding things in the outside world is difficult, especially when there are clever creatures like raccoons out there that will break in and steal everything given half a chance. [_ah6] wanted to build a feeder for feral cats that would dispense food, but without encouraging the local raccoons. So, they built a feeder that included a webcam that could see who was waiting for dinner, and dispense food remotely without spooking the cat.
The feeder is built around a modified cereal dispenser that is connected to a Raspberry Pi. This is also connected to a webcam and an IR light source. The camera view can be checked through a web browser, and the feeding can be triggered from a voice assistant. Cats are creatures of routine, so [_ah6] feeds them twice a day and the cats quickly figured out the routine. The feeder only dispenses small amounts of food, and the heavyweight construction of the feeder means that the local raccoons can’t get into the stored food. [_ah6] had originally planned to use a solar power source, but that remains a project for another day.
It took a long time, but it’s 2019, and we’re starting to get used to the concept of talking to a computer to make it control things around the house. It’s not quite as cool as it seemed when we saw it in films way back when, but that’s just real life. The problem is, there’s a multitude of different systems and standards and they don’t all necessarily work together. In [Blake]’s case, the problem is that Woods brand hardware only works with Amazon Alexa, which simply won’t do.
[Blake] went through the hassle of getting an Amazon Alexa compatible WiFi outlet to work with Google Assistant. It’s a bit of a roundabout way of doing things, but it works. A TP-Link HS-105 WiFi plug is used, which can be controlled through Google Assistant voice commands. The part consists of two PCBs – a control board that speaks WiFi, and a switching board with relays. [Blake] used the control board and hooked it up to a Raspberry Pi. When switched on by a command from Google, the HS-105 sets a pin high, which is detected by the Raspberry Pi. The Raspberry Pi then runs a software implementation of the KAB protocol used by the Woods hardware, triggering it when it receives the signal from the TP-Link hardware.
If we understand correctly, [Blake] had to go to this trouble in order to make his special outdoor-rated outlets work with his Google Home setup. Hopefully interoperability improves in years to come, but we won’t hold our breath.
The dark, dystopian future is ever-present in the Netflix show Black Mirror, but the latest release in the series, Bandersnatch, presents a decidedly different narrative. Bandersnatch is a branching story that follows the fictional events of a garage-programmer named Stephan who develops the titular game, Bandersnatch, for the Tuckersoft company set in 1980s England. The whole thing plays out as a choose-your-own adventure game fit straight off the Sega CD (albeit with actual full motion video) by allowing watchers to pick what happens next in the story. Not one to miss a cross-promotional opportunity, Netflix also released a playable ZX Spectrum homebrew title, Nohzdyve, developed by a friend of Hackaday, [Matt Westcott].
Keen viewers of Bandersnatch were able to ascertain that the screeching sound at the end of the show when loaded into a ZX Spectrum would display a QR code. That in turn led to a real website for the fake Tuckersoft company (thankfully in HTML). The website itself showcases the fictional company’s software library and upcoming releases, but it also took things a step further. The duality of Bandersnatch is carried over to the website as there are branching paths for those that remove ‘www’ from the URL. Doing so reveals Tuckersoft’s website from an alternate timeline where Bandersnatch was never created, however, a downloadable copy of Nohzdyve in a .tap file is there for the taking.
The Nohzdyve game itself is a vertically scrolling action game that uses the ZX Spectrum’s garish color palette to great effect. Racking up a high score in the game can be done via emulator (for example Speccy) or for the most authentic experience, on real hardware. This may be the best reason to fire up a tape drive in a while, but for those seeking the less-analog approach there is always this gameplay footage from Mr. Tom FTW’s channel:
Motors are not overly complex, but this one is downright simple. Carl Bujega has been working on a motor design that heavily relies on the capabilities of the printed circuit board (PCB) fabrication processes. His talk at the 2018 Hackaday Superconference covers how he built a brushless DC motor and speed controller into a PCB. You can watch the newly published video after the break.
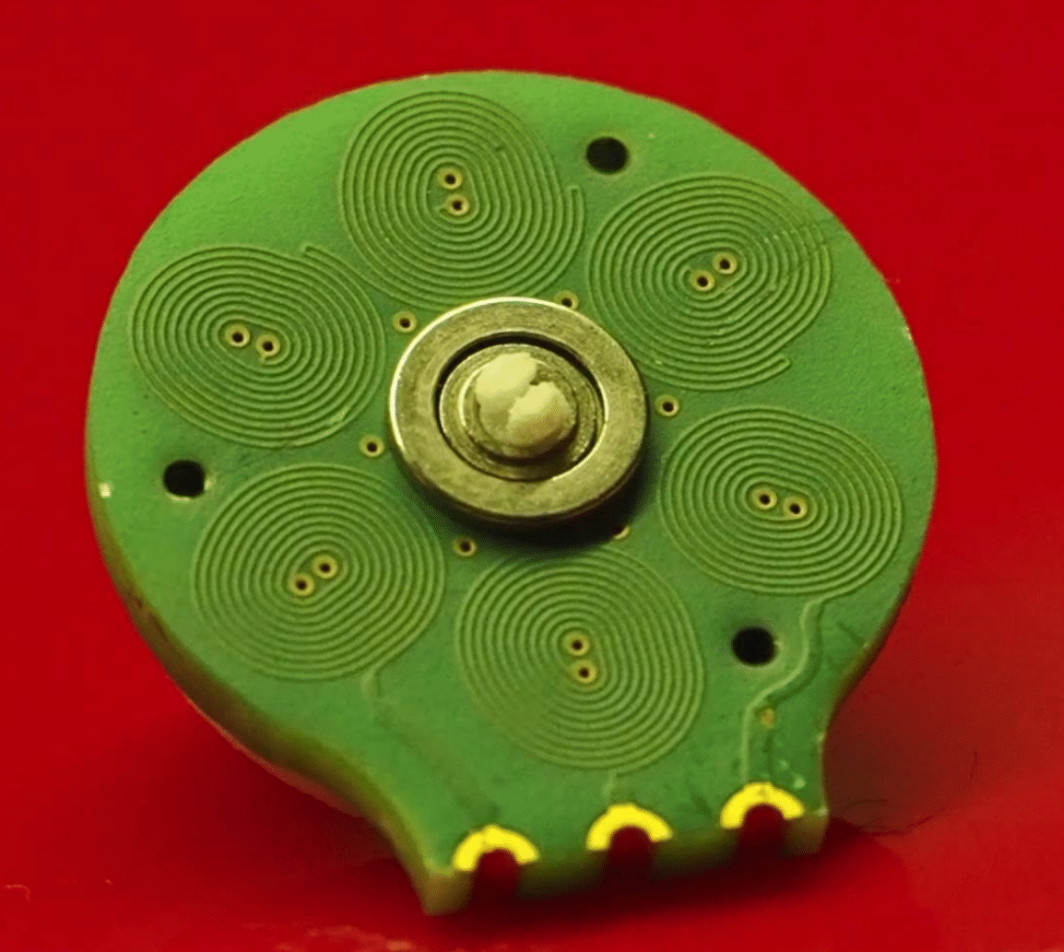
There are two main parts of an electric motor; the stator is stationary while the rotor spins on bearings. Electromagnetic forces are used to cause that spinning action. In this case, Carl has built the electromagnets as coils on a 4-layer circuit board (six coils on each layer). When electrified, a magnetic field is generated that pushes against the rare-earth magnets housed in the rotor.
A couple of things are really interesting here. First, those coils are usually made of “magnet wire” (enamel covered wire that is very thin) wrapped around an iron core. Using the circuit board instead saves both physical space, and the time and expense of wrapping coils of wire in the traditional way. Second, Carl has been designing with manufacture in mind; you can see in the image show that his motor design is dead-simple to assemble by inserting a 3mm bearing in the PCB, inserting magnets into the plastic rotor and snapping it into place. The end goal is to make robot actuators that are part of the circuit board itself.
The genesis of this idea came from Carl’s interest in drone design, in fact, he jumped right into a drone startup immediately after finishing his EE. The company didn’t last, but his thirst for interesting designs is ongoing. When looking at reducing the total parts necessary to build a quadcopter he happened on the idea of PCB-based coils and he’s followed it to this motor design, and beyond to some very interesting flexible-PCB robot design work which you can check out on his Hackaday.io page, YouTube, and Twitter.
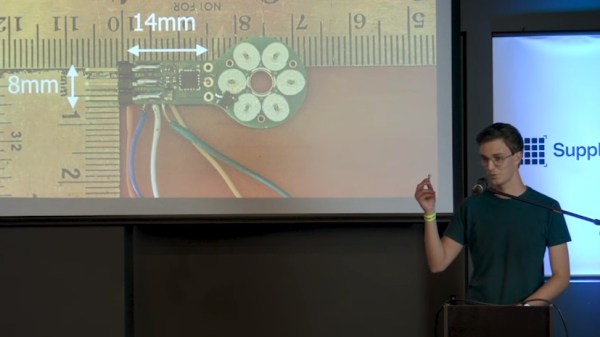
There are of course some trade-offs to this. The motor is low torque since it uses an air core and not an iron core. And he’s had trouble implementing a sensor-less Electronic Speed Controller (ESC) as the back-EMF from the coils appears to be too weak. Not to fret, he added a hall sensor and has succeeded in designing an ESC that measures just 14mm by 8mm. In fact, he’s holding up the ESC and motor in the image at the top of this article!
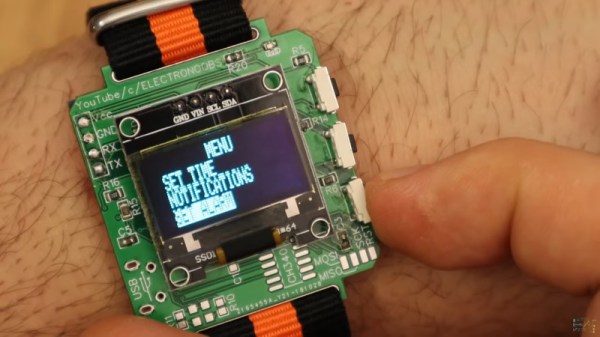
The concept of a smartwatch was thrown around for a long time before the technology truly came to fruition. Through the pursuit of miniaturisation, modern smartwatches are sleek, compact, and remarkably capable for their size. Companies such as Apple and Samsung throw serious money into research and development, but that doesn’t mean you can’t create something of your own. [Electronoobs] has done just that, with this Arduino-based smartwatch build.
The brain of the watch is that hacker staple, the venerable ATmega328, most well known for its use in the Arduino Uno and Nano platforms. An FTDI module is used for USB communication, making programming the board a snap. Bluetooth communication is handled by another pre-built module, and a smartphone app called Notiduino handles passing notifications over to the watch.
This is a build that doesn’t do anything crazy or difficult to understand, but simply combines useful parts in a very neat and tidy way. The watch is impressively thin and compact for a DIY build, and has a host of useful functions without going overboard.
The last few days have seen drone stories in the news, as London’s Gatwick airport remained closed for a couple of days amid a spate of drone reports. The police remained baffled, arrested a couple who turned out to be blameless, and finally admitted that there was a possibility the drone could not have existed at all. It emerged that a problem with the investigation lay in there being no means to detect a drone beyond the eyesight of people on the ground, and as we have explored in these pages already, eyewitness reports are not always trustworthy.
Not much use against a small and mostly plastic multirotor. Sixflashphoto [CC BY-SA 4.0]
Radar Can’t See Them
It seems odd at first sight, that a 21st century airport lacks the ability to spot a drone in the air above it, but a few calls to friends of Hackaday in the business made it clear that drones are extremely difficult to spot using the radar systems on a typical airport. A system designed to track huge metal airliners at significant altitude is not suitable for watching tiny mostly-plastic machines viewed side-on at the low altitudes. We’re told at best an intermittent trace appears, but for the majority of drones there is simply no trace on a radar screen.
We’re sure that some large players in the world of defence radar are queueing up to offer multi-million-dollar systems to airports worldwide, panicked into big spending by the Gatwick story, but idle hackerspace chat on the matter makes us ask the question: Just how difficult would it be to detect a drone in flight over an airport? A quick Google search reveals multiple products purporting to be drone detectors, but wouldn’t airports such as Gatwick already be using them if they were any good? The Hackaday readership never fail to impress us with their ingenuity, so how would you do it?
Can You Hear What You Can’t See?
It’s easy to pose that question as a Hackaday scribe, so to get the ball rolling here’s my first thought on how I’d do it. I always hear a multirotor and look up to see it, so I’d take the approach of listening for the distinctive sound of multirotor propellers. Could the auditory signature of high-RPM brushless motors be detected amidst the roar of sound near airports?
I’m imagining a network of Rasberry Pi boards each with a microphone attached, doing some real-time audio spectrum analysis to spot the likely frequency signature of the drone. Of course it’s easy to just say that as a hardware person with a background in the publishing business, so would a software specialist take that tack too? Or would you go for a radar approach, or perhaps even an infra-red one? Could you sense the heat signature of a multirotor, as their parts become quite hot in flight?
Whatever you think might work as a drone detection system, give it a spin in the comments. We’d suggest that people have the confidence to build something, and maybe even enter it in the Hackaday Prize when the time comes around. Come on, what have you got to lose!



![Not much use against a small and mostly plastic multirotor. Sixflashphoto [CC BY-SA 4.0]](https://hackaday.com/wp-content/uploads/2018/12/788px-KCMH_Radar.jpg)









