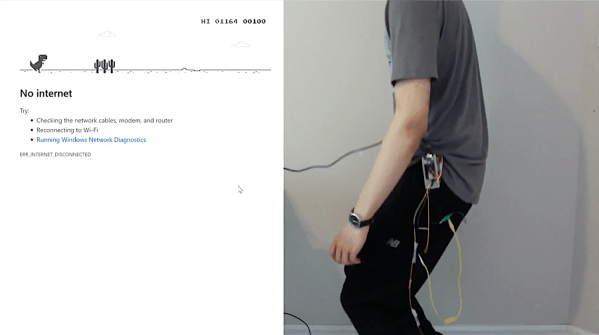
He uses the Arduino MKR board in his build, but notes any number of other boards would work as well. A force sensor detects his jumps and a stretch sensor detects him ducking. Both the stretch and force sensors are resistive transducers, so two simple voltage divider circuits (one for each sensor) are needed to convert changes in force to a voltage. You may need to adjust the sensor threshold to ensure the code responds to your movements, but [Ryan] makes that pretty easy to do in software as both thresholds are stored as global variables.
It’s a pretty simple hack, but could make for some good socially-distanced fun. What other hackable Google Chrome extensions do you like?
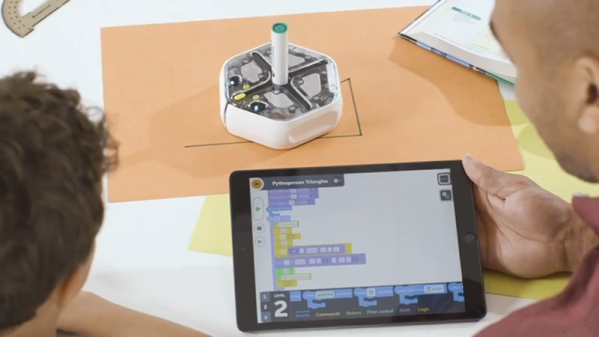
When you think of iRobot, you probably think of floor cleaning or military robots. But they also have a set of robots aimed at education. The Root robot — an acquisition the company made in 2019 — originally targeted classrooms and cost about $200 each. A new version costs about $130 and is a better fit for home users.
The original version — Root rt1 — is still available, but the rt0 version has several missing features to hit the desired price. What’s missing? Apparently, the rt1 can stick to a whiteboard using magnets, but that feature is missing on the rt0. There are also no “cliff” sensors or color scanner.
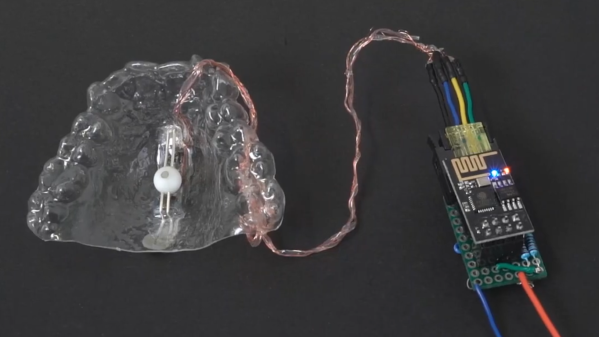
For interfacing with machines, most of us use our hands and fingers. When you don’t have use of your hands (permanently or temporarily), there are limited alternatives. [Dorothee Clasen] has added one more option, [In]Brace, which is basically a small slide switch that you can operate with your tongue.
[In]Brace consists of a custom moulded retainer for the roof of your mouth, on which is a small ball with an embedded magnet, that slides long wire tracks. Above the track is a set of three magnetic sensors, that can detect the position of the ball. On the prototype, a wire from the three sensors run out of the corner of the users mouth, to a wireless microcontroller (Which looks to us like a ESP8266) hooked behind the user’s ear. In a final product, it would obviously be preferable if everything were sealed in the retainer. We think there is even more potential if one of the many 3-axis hall effect sensors are used, with a small joystick of rolling ball. The device could be used by disabled persons, for physical therapy, or just for cases where a person’s hands are otherwise occupied. [Dorothy] created a simple demonstration, where she plays Pong, or Tong in this case, using only the [In]Brace. Hygiene and making sure that it doesn’t somehow become a choke hazard will be very important if this ever became a product, but we think there is some potential.
[Kristina Panos] did a very interesting deep dive into the tongue as an HMI device a while ago, so this isn’t a new idea, but the actual implementations differ quite a lot. Apparently it’s also possible to use your ear muscles as an interface!
As time marches on and a good percentage of us are still isolating from society at large, the progress of technology isn’t kept as stagnant. Earlier this year we featured a project about a much-needed small telepresence robot with an exceptionally low barrier for entry, and with the progress of time it has received several upgrades and some crowdfunding, all while preserving its original intent of a simple and easily-operated way of keeping in contact with others.
The new robot is still based on the cardboard design that holds a smartphone and drives it around using a microcontroller platform, but thanks to its small size and low power requirement this seems to suit it nicely. Improvements over the original design include a more robust one-size-fits-all phone mount and a more refined cardboard body. Also, since the small size is a little bit of a downside when navigating anywhere that isn’t a desk or counter, the new version makes it easier to make modifications such as adding a pedestal which can elevate the phone and improve the experience of the remote driver. A number of other optional modifications are possible as well, including a grabbing arm.
While telepresence robots unfortunately are needed now more than ever, we are happy to see people like [Ross] take on projects like this which will hopefully help improve our shared situation by allowing us to have a more involved level of contact with people we would otherwise prefer to see in person. If you’d like to build your own without waiting on the crowdfunding, be sure to check out the original project we featured back in April.
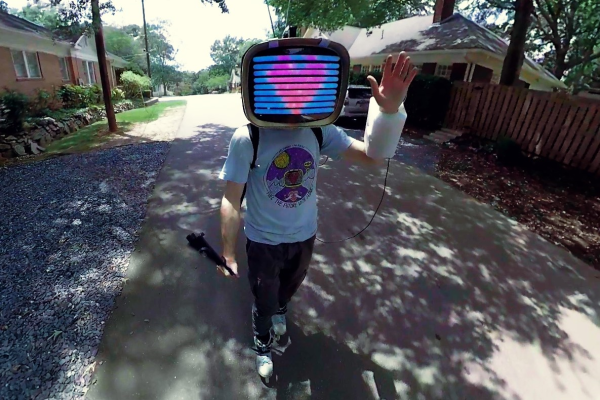
Gesture recognition and machine learning are getting a lot of air time these days, as people understand them more and begin to develop methods to implement them on many different platforms. Of course this allows easier access to people who can make use of the new tools beyond strictly academic or business environments. For example, rollerblading down the streets of Atlanta with a gesture-recognizing, streaming TV that [nate.damen] wears over his head.
He’s known as [atltvhead] and the TV he wears has a functional LED screen on the front. The whole setup reminds us a little of Deep Thought. The screen can display various animations which are controlled through Twitch chat as he streams his journeys around town. He wanted to add a little more interaction to the animations though and simplify his user interface, so he set up a gesture-sensing sleeve which can augment the animations based on how he’s moving his arm. He uses an Arduino in the arm sensor as well as a Raspberry Pi in the backpack to tie it all together, and he goes deep in the weeds explaining how to use Tensorflow to recognize the gestures. The video linked below shows a lot of his training runs for the machine learning system he used as well.
[nate.damen] didn’t stop at the cheerful TV head either. He also wears a backpack that displays uplifting messages to people as he passes them by on his rollerblades, not wanting to leave out those who don’t get to see him coming. We think this is a great uplifting project, and the amount of work that went into getting the gesture recognition machine learning algorithm right is impressive on its own. If you’re new to Tensorflow, though, we have featured some projects that can do reliable object recognition using little more than a Raspberry Pi and a camera.
For most of us, electronic technology comes in the form of solid state devices. Transistors, integrated circuits, microcontrollers. But for the first sixty years or so of the field existing, these devices either hadn’t been invented yet or were at too early a stage in their development to be either cost-effective, or of much use. Instead a very different type of electronic component ruled the roost, the vaccum tube.
A set of electrodes in an evacuated glass envelope whose electrical properties depended on the modulation of the flow of electrons through them, these were ubiquitous in consumer electronics up until the 1960s, and clung on in a few mass-market applications even as far as the mid 1970s. As cheaper and more versatile semiconductors superseded them they faded from electronic parts catalogues, and the industry that had once produced them in such numbers disappeared in favour of plants producing the new devices. Consumer products no longer contained them, and entire generations of engineers grew up never having worked with them at all. If you were building a tube amplifier in the early 1990s, you were a significant outlier. Continue reading “Just Who Makes Tubes These Days?”→
When [Andrew Consroe] tried to build a CNC scroll saw, he quickly learned how tricky of a design problem it is. With a blade that only cuts in one direction, you can’t simply move the tool in the X and Y dimensions like you can with a laser or router; either the work piece or the blade itself needs to continuously rotate towards the direction of the cut.
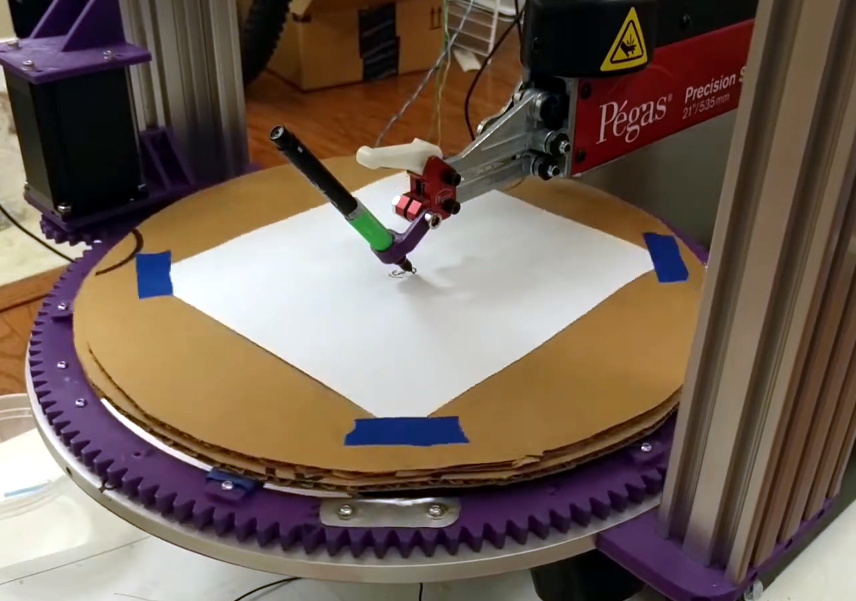
He’s recently shown off the third version of the machine, and while it’s still not exactly a practical tool, there’s no question it’s a brilliantly designed one, or that it works, slowly. Earlier attempts used a rotating table to spin the work piece, but [Andrew] found this to be an imperfect solution. Building a mechanism heavy duty enough to spin the material being cut while remaining accurate enough not to break the blade was a tall order, though he did get pretty close.
The earlier version used a rotating table.
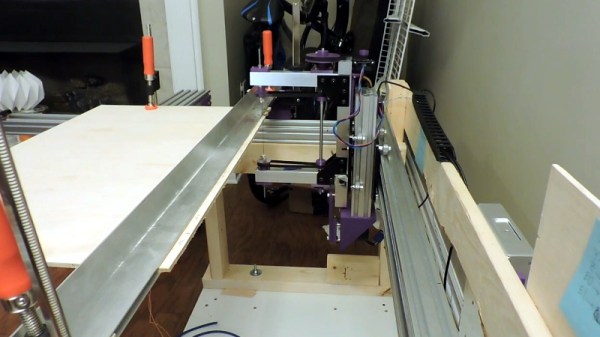
This time around he’s decided to simply rotate the blade itself. This can be accomplished with a single stepper motor and some suitably sized pulleys, while maintaining an exceptionally high degree of accuracy. The whole blade assembly moves up and down on an aluminum extrusion rail with a motor and crank arrangement. By synchronizing the rotation of the blade with the vertical movement of the saw, the software can be sure that everything is where it needs to be before the cutting stroke actually happens.
Judging by the video after the break, the system works quite well. The complex rounded shapes he cuts out of the piece of plywood look essentially perfect, and it sounds like this new version of the machine isn’t breaking blades due to positional errors like the previous one did. Unfortunately, it’s also very slow. There’s so many moving parts and careful positioning required that even when the video is sped up 10x, the saw still appears to only be creeping its way through the material.
On the back half of the video, [Andrew] details another approach to rotating the blade that would reduce the amount of moving mass in the saw. This would give the machine a considerable speed boost, and we’d love to see him implement it. By the way, before anyone says it: using a spiral blade is cheating.