Cheap, easy to use SDR dongles are an immensely powerful tool for learning about radio technology. However, building your own SDR is not something too many hackers are confident to tackle. [Ashhar Farhan, VU2ESE] hopes to change this with the sBITX, a hackable HF SDR transceiver designed around the Raspberry Pi.
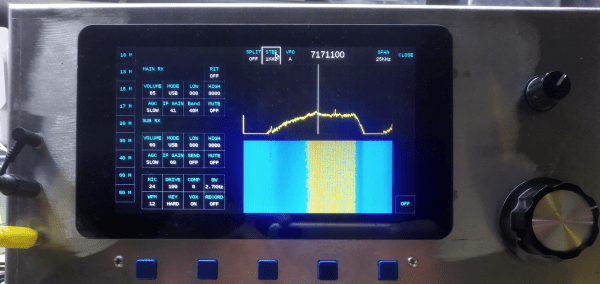
[Ashhar] introduced the project in talk at the virtual “Four Days In May” annual conference of the QRP Amateur Radio Club International. Watch the full talk in the video after the break. He first goes over the available open source SDR radios, and then delves into his design decisions for the sBITX. One of the primary goals of the project was to lower the barrier of entry. To do this, he chose the Raspberry Pi as base, and wrote C code that that anyone who has done a bit of Arduino programming should be able to understand and modify. The hardware is designed to be as simple as possible. On the receive side, a simple superheterodyne architecture is used to feed a 25 kHz wide slice of RF spectrum to an audio codec, which send the digitized audio to the Raspberry Pi. The signal is then demodulated in software using FFT. For transmit, the signal is generated in software, and then upconverted to the desired RF frequency. [Ashhar] also created a GUI for the 7″ Raspberry Pi screen.
At the moment the sBITX is still in the development stage, information is spread between the video after the break, it’s accompanying PDF, the GitHub repo, and a thread on the BITX20 group.
[Ashar Farhan] is well known in the ham radio community for low cost radio designs like the BITX, and it’s successor, the μBITX. He also created the Antuino, an Arduino based antenna tester. Continue reading “SBITX: Hackable HF SDR For The Raspberry Pi”