[Florian] and his engineering team at Munich-based bmc::labs has developed a clever set of prototyping boards for vehicle hacking and rapid product development, collectively called the bmc::board or bmc::mini. These stackable development boards were initially designed for in-house use. The team took a general purpose approach to the design so the boards could be used across a wide range of projects, and they should be useful to anyone in the field. [Florian] decided to release the boards to the community as open-source and certified by OSHWA (Open Source Hardware Association).
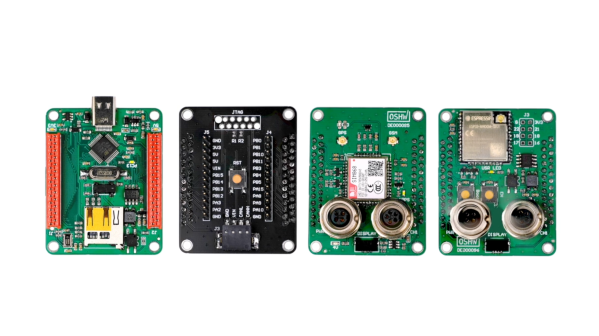
There are four boards currently defined, with several more in the works:
- mini::base — Main microcontroller board, STM32F103-based
- mini::out — I/O board with CAN bus, JTAG, etc.
- mini:: grid — RF board providing GPS and GSM capability
- mini::pit — local wireless connectivity, WiFi and Bluetooth, and 2nd CAN bus
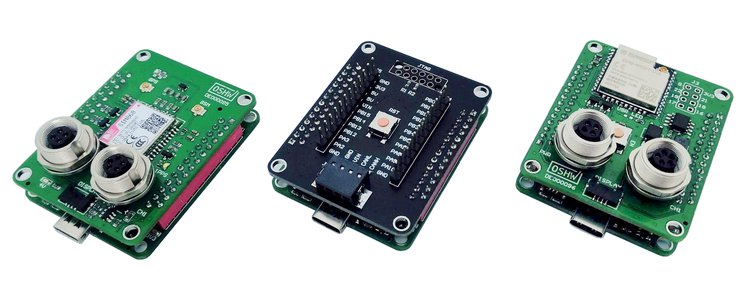
At 54 x 42.5 mm, these boards are pretty small; a form-factor they describe as “exactly half a credit card”. We like the Wurth WR-MM family of stacking connectors they are using, and the symmetrical pinout means you can rotate the cards as needed. But at first glance, these thru-hole connectors seem to limit the stack to just two boards, although maybe they plan move to an SMT flavor of the connector in future designs permitting taller stacks.
If you’re into vehicle electronics and/or vehicle hacking, definitely take a look at these. You can check out [Florian]’s bmc::board Hackaday.io project page and the team’s GitHub repository for more details. Here’s another project by team member [Sebastian] using one of the future bmc::bike modules to eavesdrop on ECU communications, where he sensibly advises the reader “First, pull over and get off the bike. Never hack a two-wheeled vehicle while riding it!”.
No discussion of vehicle CAN bus tools should omit the work of Craig Smith, who literally wrote the book on hacking your car, and whose talk along with Hackaday’s own Eric Evenchick of CANtact fame we covered back in 2016. [Florian] has started a CrowdSupply campaign where you can see some more details of this project and a short promotional video.