Last week we covered the past and current state of artificial intelligence — what modern AI looks like, the differences between weak and strong AI, AGI, and some of the philosophical ideas about what constitutes consciousness. Weak AI is already all around us, in the form of software dedicated to performing specific tasks intelligently. Strong AI is the ultimate goal, and a true strong AI would resemble what most of us have grown familiar with through popular fiction.
Artificial General Intelligence (AGI) is a modern goal many AI researchers are currently devoting their careers to in an effort to bridge that gap. While AGI wouldn’t necessarily possess any kind of consciousness, it would be able to handle any data-related task put before it. Of course, as humans, it’s in our nature to try to forecast the future, and that’s what we’ll be talking about in this article. What are some of our best guesses about what we can expect from AI in the future (near and far)? What possible ethical and practical concerns are there if a conscious AI were to be created? In this speculative future, should an AI have rights, or should it be feared?
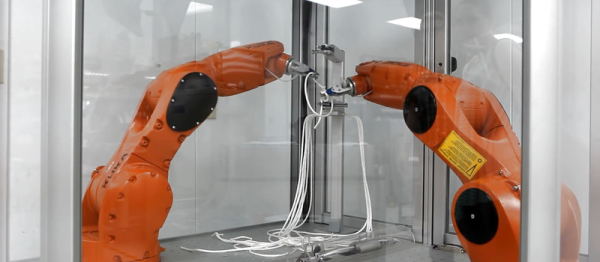
We’re not ashamed to admit that we desperately want a pair of high-end industrial robot arms to play around with. We don’t know where we’d put them — maybe the living room? — but we know that we’d figure something out.
This demo aims to get Boy Scouts interested in robotics by applying the beastly arms to something that all kids love, learning to tie knots. (If you ask us, they’ve got it backwards.) Anyway, there are two videos embedded below for you to peek at.
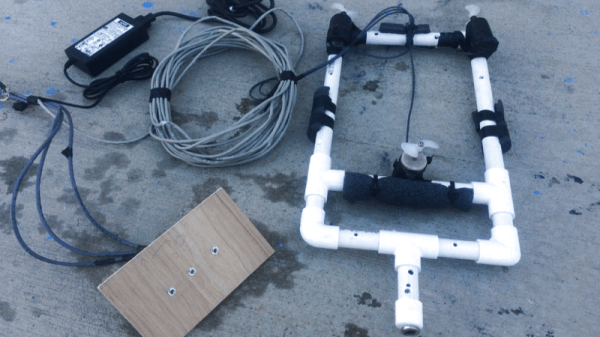
[mark.brubaker.1] and his crew decided to make a submersible for a school project using PVC pipes as a frame. It has two motors on the back to provide forward thrust and steering as well as a horizontal mounted motor in the middle of the PVC chassis to provide up and down thrust. They used regular motors which they waterproofed by inserting them inside a case full of plumbers wax. We’re not sure how long this will hold at the bottom of the ocean, but it works fine for a school project in the pool. Here’s the instructions on how to make one.
The build is completely analog, the controller is a board with three switches which individually control the different motors. So if you want to turn left, you fired up the right motor. For right you do the opposite and fire up the left motor. Up and down, well, you get the picture. If you have a swimming pool, lake or some water body nearby and you’re looking for a weekend project with your kids, this is a great tip. It’s not an Arduino controlled robot fish, but it’s a first step in that direction; you can later on use the frame to improve on the design and add some electronics.
If you’ve ever seen “Lost in Space” in Portuguese, you’d definitely recognize the phrases that [Everaldo]’s B9 robot reads off of the SD card inside its belly. If not, you can check out the video below and learn such important phrases as “Warning! Alien approaching.” or “The planet’s breaking up” (we presume). Or head over to [Everaldo]’s website and check out the great model build log. And while you’re there, check out his model TRS80 too.)
There’s a lot of solid model-building going on here, but hidden inside the pretty exterior is some good old-fashioned hacking. Once the audio was stored on the SD card, [Everaldo] simply soldered it straight into the project. There’s also an IR daughterboard that drives the robot, while blinky lights and servo motors bring it to life. We want one for our desk!
If you haven’t made an IR-remote-based project, you really should. It’s still among the most hackable of methods to transmit data to or from a microcontroller, while making use of one of those superfluous IR remotes you have kicking around the house. If you’re short on inspiration, and not a model-builder, check out this Hacklet dedicated to IR, or our favorite smart-home(r) device of all time.
Are you thinking what we’re thinking? This would make an excellent entry in the Hackaday Sci-Fi contest which is accepting entries through March 6th.
When our new computer overlord arrives it’ll likely give orders using an electromagnetic speaker (or more likely, by texting instead of talking). But for a merely artificial human being, shouldn’t we use an artificial mouth with vocal cords chords, nasal cavity, tongue, teeth and lips? Work on such a thing is scarce these days, but [Martin Riches] developed a delightful one called MotorMouth between 1996 and 1999.
It’s delightful for its use of a Z80 processor and assembly language, things many of us remember fondly, as well as its transparent side panel, allowing us to see the workings in action. As you’ll see and hear in the video below, it works quite well given the extreme difficulty of the task.
Certainly one of the more entertaining talks of the 33rd Chaos Communications Congress was [Kari Love]’s talk on her experiments in mixing food with function. In [Kari]’s talk at the 2016 Hackaday Supercon, she talked extensively about working on soft robotic for NASA. At the 33C3, her focus was twofold: on a fun side project to make mobile robots out of stuff that you can eat, and to examine the process of creative engineering through the lens of a project like this.
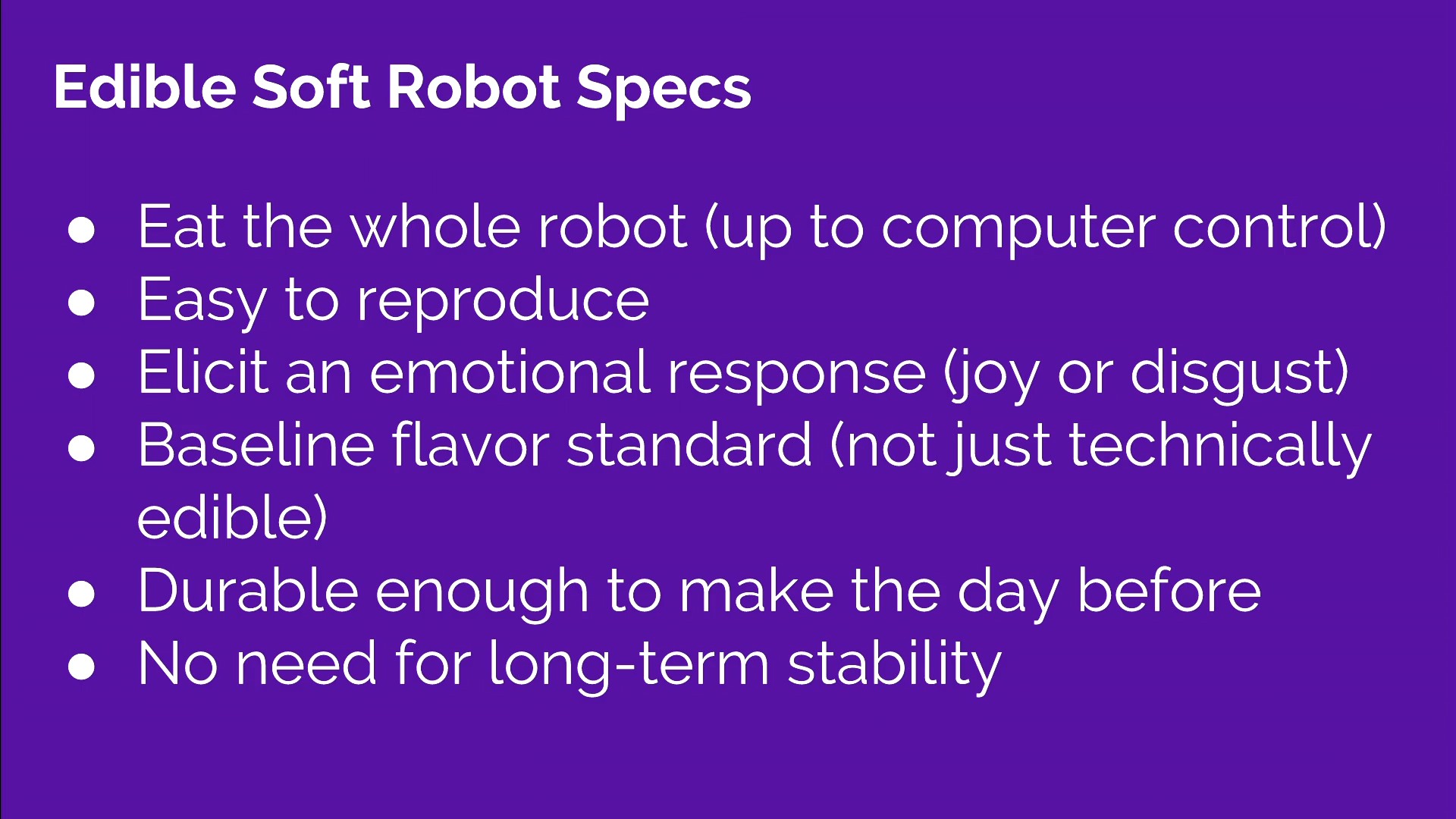
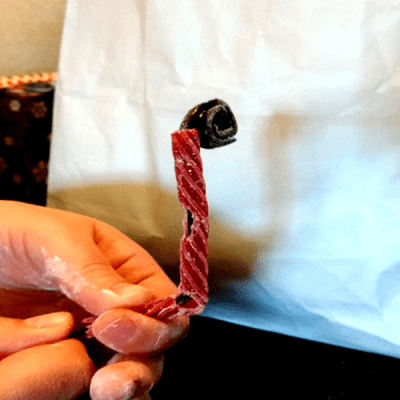
If you look up edible robotics, you get a lot of medical literature about endoscopes that you can swallow, or devices that take samples while they’re inside you. That’s not what [Kari]’s after at all. She’s after a robot that’s made of candy, a yummy machine. And while this is still a work in progress, she demonstrated a video of an all-licorice cable-based actuator.
But more than that, she demonstrated all of the materials she’s looked at so far, and the research she’s done. To some extent, the process is the substance of this project, but there’s nothing wrong with some tasty revelations along the way.
This talk was a potpourri of helpful tips and novel facts. For instance, if you’re working in candy robotics, don’t eat your mistakes. That stomach ache that your mom always said you’d get? You will. Did you know that the gummi in gummibears is re-heatable and re-moldable? In addition, of the gels that she made, it was the most delicious. And finally, Pop Rocks don’t have enough CO2 in them to drive pneumatics. Who knew? [Kari] knows. And now you do too.
The concept of artificial intelligence dates back far before the advent of modern computers — even as far back as Greek mythology. Hephaestus, the Greek god of craftsmen and blacksmiths, was believed to have created automatons to work for him. Another mythological figure, Pygmalion, carved a statue of a beautiful woman from ivory, who he proceeded to fall in love with. Aphrodite then imbued the statue with life as a gift to Pygmalion, who then married the now living woman.
Pygmalion by Jean-Baptiste Regnault, 1786, Musée National du Château et des Trianons
Throughout history, myths and legends of artificial beings that were given intelligence were common. These varied from having simple supernatural origins (such as the Greek myths), to more scientifically-reasoned methods as the idea of alchemy increased in popularity. In fiction, particularly science fiction, artificial intelligence became more and more common beginning in the 19th century.
But, it wasn’t until mathematics, philosophy, and the scientific method advanced enough in the 19th and 20th centuries that artificial intelligence was taken seriously as an actual possibility. It was during this time that mathematicians such as George Boole, Bertrand Russel, and Alfred North Whitehead began presenting theories formalizing logical reasoning. With the development of digital computers in the second half of the 20th century, these concepts were put into practice, and AI research began in earnest.
Over the last 50 years, interest in AI development has waxed and waned with public interest and the successes and failures of the industry. Predictions made by researchers in the field, and by science fiction visionaries, have often fallen short of reality. Generally, this can be chalked up to computing limitations. But, a deeper problem of the understanding of what intelligence actually is has been a source a tremendous debate.
Despite these setbacks, AI research and development has continued. Currently, this research is being conducted by technology corporations who see the economic potential in such advancements, and by academics working at universities around the world. Where does that research currently stand, and what might we expect to see in the future? To answer that, we’ll first need to attempt to define what exactly constitutes artificial intelligence.




 But more than that, she demonstrated all of the materials she’s looked at so far, and the research she’s done. To some extent, the process is the substance of this project, but there’s nothing wrong with some tasty revelations along the way.
But more than that, she demonstrated all of the materials she’s looked at so far, and the research she’s done. To some extent, the process is the substance of this project, but there’s nothing wrong with some tasty revelations along the way.









