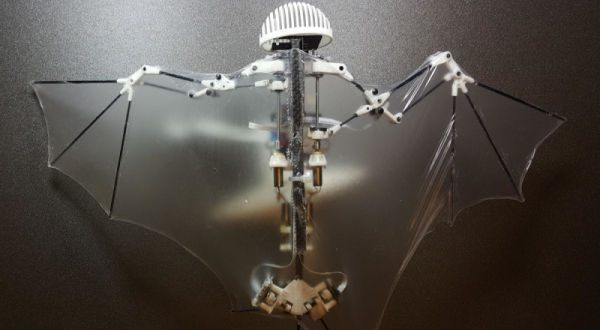
How would you like a bat bot for your next pet drone? Researchers from the University of Illinois at Urbana-Champaign’s Coordinated Science Laboratory and from the California Institute of Technology, created a bat drone. This is not your regular drone; it’s not a styrofoam, bat-shaped, four-propeller kind of drone. It’s a drone that mimics not only the shape but the movement of the bats wings to achieve flight.
The biomimetic robotic platform, dubbed Bat Bot B2, is an autonomous flying robot. The wing mechanics are controlled by a brushless DC motor for the wing flapping along with four wings actuators to provide linear motion that allows the wings to further change shape in flight. The wings are made of a 56-micron, silicone-based membrane (thinner than an average condom), which for sure helps with their elasticity as well as reducing overall weight, which is only 93 grams.
The bat has only made twenty flights so far, ranging up to 30 meters with some rough landings. It’s not much yet, but the prototype looks pretty slick. We covered another bat bot back in 2012 but the original information is no longer available, and we don’t know what happened to that project. There was also no video. In contrast, you can watch Bat Bot B2 glide.