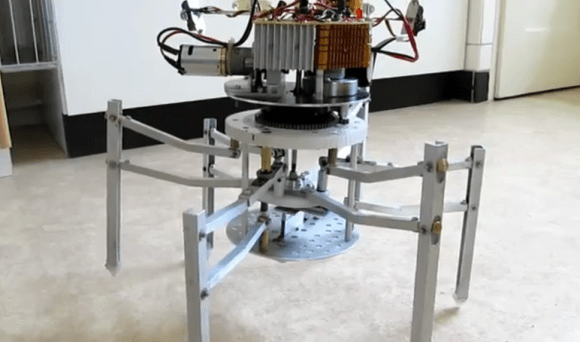
Over at Mad Lab Industries, they had the idea of building a quadcopter that could walk and fly. By combining a hexapod with a hexacopter, they ended up with this creation.
The hexapod part started off with PhantomX Hexapod Kit, but it was far too heavy to fly. To reduce weight, they manufactured carbon fibre parts for the frame and legs. Even with the weight reductions, they still needed to six rotors to keep it stable.
The hexacopter part of the build uses more custom carbon fibre parts to mount the motors. The booms and mounts are also custom built out of aluminium. They used six E-Flite motors, propellers, and ESCs to provide lift.
A variety of controllers are used to run the robot. Two Arbotix devices handle the hexapod control, and a Hoverfly flight controller keeps it in the air. It’s controlled remotely using a Spektrum controller.
They have some ambitious next steps, including a mechanism that disconnects and reconnects the hexacopter and the base. After the break, check out a video of this impressive build in action.