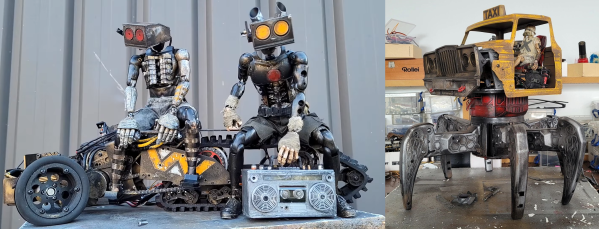
The hacker spirit is always alive and well in post-apocalyptic fiction, as characters throw together contraptions from whatever junk they can find. While these might not always be practical or possible in reality, their primary purpose is usually to look the part. This is definitely the case for [Danny Huynh]’s post-apocalyptic animatronic creations, which look like they can slot straight into Mad Max or Fallout.
[Danny] is an avid RC enthusiast, so many of the models are highly customized off-the-shelf RC cars. However, it’s the lifelike moving characters in these models that really catch the eye. Their hands and feet move with the steering and throttle, and in the motorcycle builds they will often lean with the turns. Other notable builds include a hexapedal taxi and a couple of animatronic bands.
All the vehicle builds are electric, but it looks like [Danny] often includes an audio module to simulate a roaring engine. He makes extensive use of servos and linkages for character movement, with wiring and electronics carefully hidden by paint or bodywork.
With all the CGI technology available today, great animatronic builds like an eerily lifelike heart, or a talking Nikola Tesla are all the more impressive to see.
Continue reading “Small Scale Mad Max: Danny Huynh’s Dystopian Animatronics”