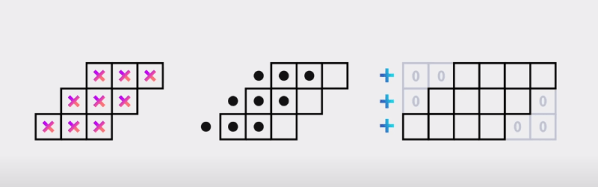
People tend to obsess over making computer software faster. You can, of course, just crank up the clock speed and add more processors, but often the most powerful way to make something faster is to find a better way to do it. Sometimes those methods are very different from how a human being would do the same task, but it suits the computer’s capabilities. [Nemean] has a video explaining a better multiplication algorithm known as Karatsuba’s algorithm and it is actually quite clever. You can see the video below.
To help you understand the algorithm, the video shows a simple two-digit by two-digit multiplication. You can see that the first and last digits are essentially the result of one multiplication. It is all the intermediate digits that add together. The only thing that might change the first digit is a carry.
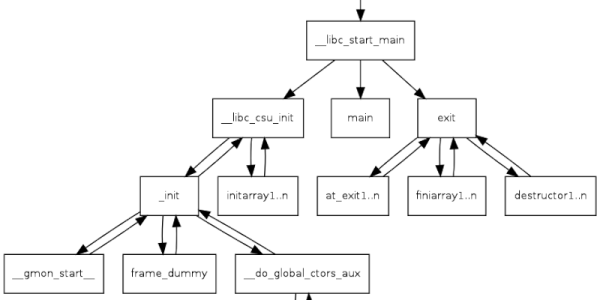
Have you ever had a program crash before your main function executes? it is rare, but it can happen. When it does, you need to understand what happens behind the scenes between the time the operating system starts your program and your first line of code in main executes. Luckily [Patrick Horgan] has a tutorial about the subject that’s very detailed. It doesn’t cover statically linked libraries but, as he points out, if you understand what he does cover, that’s easy to figure out on your own.
The operating system, it turns out, knows nothing about main. It does, however, know about a symbol called _start. Your runtime library provides this. That code contains some stack manipulation and eventually calls __libc_start_main which is also provided by the library. Continue reading “The Linux X86 Journey To Main()”→
The Python world has been fractured a few times before. The infamous transition from version 2 to version 3 still affects people today, and there could be a new schism in the future. [Sam Gross] proposed a solution to drop the Global Interrupt Interpreter Lock (GIL), which would have enormous implications for many projects that leverage the CPython internals, such as Pandas and NumPy.
The fact that Python is interpreted is a double edge sword. It means there can be different runtimes, such as Pyston, Cinder, MicroPython, PyPy, and others, that might support the whole language, a specific version, or a subset. But if you’re using Python, you’re probably running CPython. And it has something known as global interpreter lock that affects threaded code. In a nutshell, only one thread can run in the interpreter at a time. There are some ways around it, such as moving performance-critical sections to C or having multiple interpreters. However, most existing solutions come with considerable downsides. Continue reading “Python Ditches The GILs And Comes Ashore”→
Here at Hackaday we love the good kinds of hacks, but now and then we need to bring up a less good kind. Today it was learned that the NPM package ua-parser-js was compromised, and any software using it as a library may have become victim of a supply chain attack. What is ua-parser-js and why does any of this matter?
In the early days of computing, programmers would write every bit of code they used themselves. Larger teams would work together to develop larger code bases, but it was all done in-house. These days software developers don’t write every piece of code. Instead they use libraries of code supplied by others.
For better or worse, repositories of code are now available to do even the smallest of functions so that a developer doesn’t have to write the function from scratch. One such registry is npm (Node Package Manager), who organize a collection of contributed libraries written in JavaScript. One only need to use npm to include a library in their code, and all of the functions of that code are available to the developer. One such example is ua-parser-js which is a User Agent Parser written in JavaScript. This library makes it easy for developers to find out the type of device and software being used to access a web page.
On October 22 2021, the developer of ua-parser-js found that attackers had uploaded a version of his software that contained malware for both Linux and Windows computers. The malicious versions were found to steal data (including passwords and Chrome cookies, perhaps much more) from computers or run a crypto-currency miner. This prompted GitHub to issue a Critical Severity Security Advisory.
What makes this compromise so dangerous is that ua-parser-js is considered to be part of a supply chain, and has been adopted even by Facebook for use in some of its customer facing software. The developer of ua-parser-js has already secured his GitHub account and uploaded new versions of the package that are clean. If you have any software that uses this library, make sure you’ve got the latest version!
Of course this is by no means a unique occurrence. Last month Maya Posch dug into growing issues that come from some flaws of trust in package management systems. The art for that article is a house of cards, an apt metaphor for a system that is only as stable as the security of each and every package being built upon.
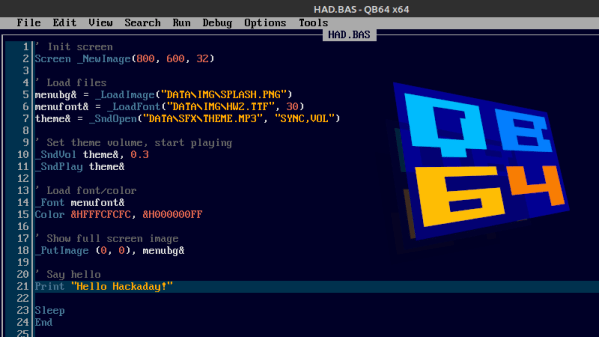
Despite the name, BASIC isn’t exactly a language recommended for beginners these days. Technology has moved on, and now most people would steer you towards Python if you wanted to get your feet wet with software development. But for those who got their first taste of programming by copying lines of BASIC out of a computer magazine, the language still holds a certain nostalgic appeal.
If that sounds like you, then may we heartily recommend QB64. The open source project seeks to modernize the classic programming language while retaining compatibility for QBasic 4.5, the late-80s BASIC environment Microsoft included with MS-DOS. That modernization not only includes the addition of contemporary technology like OpenGL, but cross-platform support that lets you run the same code on Windows, Linux, and Mac OS.
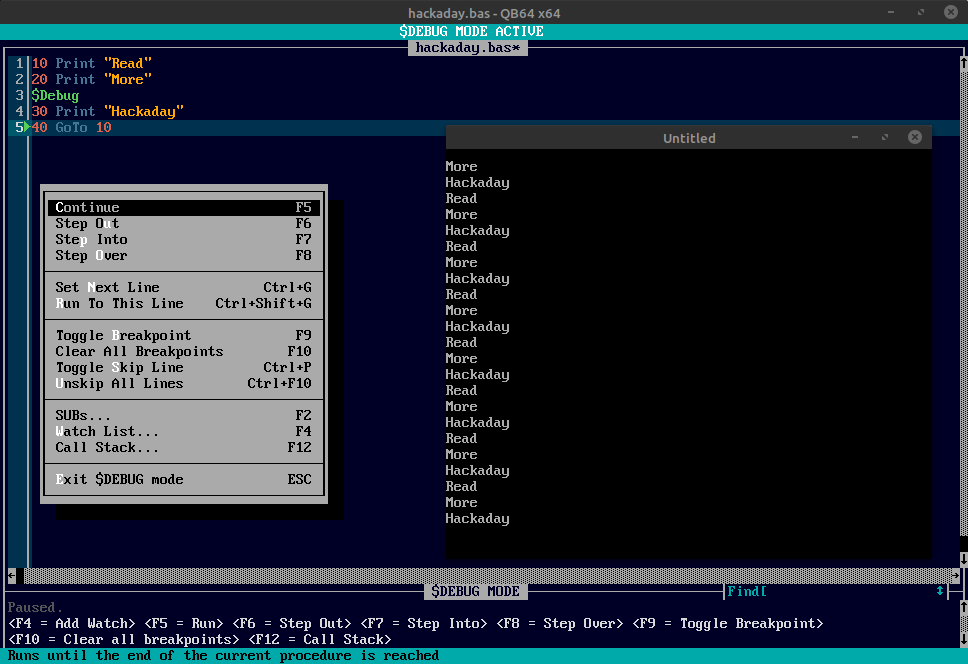
The new debug mode in QB64 v2.
The QB64 team released version 2.0 just a few days ago, making this the perfect time to give the project a test drive if you haven’t tried it out yet. The changelog includes platform specific improvements for each supported operating system, as well as a long list of general fixes and updates. But arguably the biggest feature for this release is the inclusion of the $Debug metacommand.
When this command is included in your code, the IDE will insert a debugging stub into the compiled program. During execution, the QB64 IDE will switch over to debugging mode, and communicate with your program in real-time over a local TCP/IP connection. The debugging mode lets you step through the code line-by-line, check the values of variables, and set breakpoints. Once you’re done fussing with the code and want to release a final binary, you just need to remove that single $Debug command and recompile.
Those of us tasked with developing firmware for embedded systems have a quite a few hurdles to jump through compared to those writing for the desktop or mobile platforms. Solved problems such as code reuse or portability are simply harder. It was with considerable interest that we learnt of another approach to hardware abstraction, called Luos, which describes itself as micro-services for embedded systems.
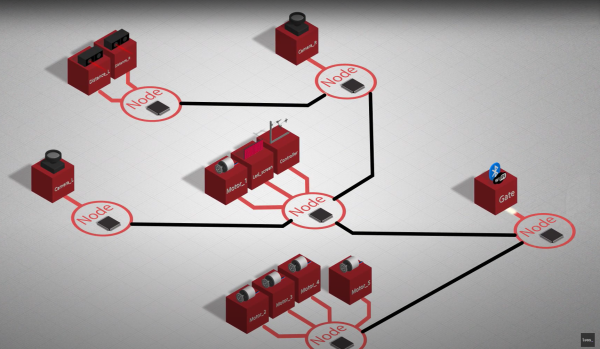
This open source project enables deployment of distributed architectures composed of collaborating micro-services. By containerizing applications and hardware drivers, interfaces to the various components are hidden behind a consistent API. It doesn’t even matter where a resource is located, multiple services may be running on the same microcontroller, or separate ones, yet they can communicate in the same way.
By following hardware and software design rules, it’s possible to create an architecture of cooperating computing units, that’s completely agnostic of the actual hardware. Microcontrollers talk at the hardware level with a pair of bidirectional signals, so the hardware cost is very low. It even integrates with ROS, so making robots is even easier.
Luos architecture
By integrating a special block referred to as a Gate, it is possible to connect to the architecture in real-time from a host computer via USB, WiFi, or serial port, and stream data out, feed data in, or deploy new software. The host software stack is based around Python, running under Jupyter Notebook, which we absolutely love.
Current compatibility is with many STM32 and ATSAM21 micros, so chances are good you can use it with whatever you have lying around, but more platforms are promised for the future.
Now yes, we’re aware of CMSIS, and the idea of Hardware Abstraction Layers (HALs) used as part of the platform-specific software kits, this is nothing new. But, different platforms work quite differently, and porting code from one to another, just because you can no longer get your preferred microcontroller any more, is a real drag we could all do without, so why not go clone the GitHub and have a look for yourselves?
How many of us who have a few decades of adulthood under our belts would like to talk to our 17 year old selves? “Hey kid, it’s all gonna be OK. Also, Duke Nukem Forever does come out eventually, but it’s not going to be pretty!” Being honest, exposure to the hot takes of one’s naive teenage self would almost certainly be as cringeworthy as the time-worn-but-familiar adult would be to the teenager, but there’s one way in which you can in a sense have a conversation with your teenage self. [Mad Ned] had this opportunity, when he discovered a printed BASIC listing for a game he’d written for the TRS-80 back in 1981. Could he make it run again, and what did it tell him about his teenage years?
Grizzled 8-bit veterans will tell you of countless hours spent typing poorly-reproduced listings found in magazines, and the inevitable pain that followed as all those mistypes were ironed out. [Ned] eschewed all that retro experience because this is the 21st century, and we now have much more powerful computers to do our bidding! The reality of incomplete OCR is one we’ll no doubt all be used to, and for 8-bit fans also the debugging that was needed to get the listing to run. Breaker Ball is an odd hybrid of Breakout and Space Invaders, and it’s his analysis of the teenage thinking that led to the game being the way it is that rounds off the piece. Sadly we’re not treated to the entire listing, but there’s a short gameplay video we’ve placed below the break.