LCDs come in a lot of sizes, and there’s a lot written about pushing pixel data out to larger displays. Smaller LCDs, like the 4, 5 and 7 inch variety, aren’t used much, because no one seems to know how to drive the things. For [Joe]’s Hackaday Prize Entry, he’s creating an open source interface for tiny LCDs, making it easy and cheap to add one to everything with an HDMI port.
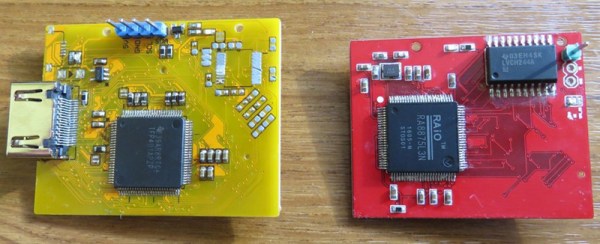
[Joe]’s Open LCD Interface comes on two boards, with the first providing connections to an LCD, all the power circuitry required, and a bunch of pads to break out every IO line. The second part of the puzzle is a decoder that takes HDMI signals and drives a small LCD.
HDMI decoders are nothing new to the world of hobby electronics – there are multiple projects that give the BeagleBoard a display through HDMI. Even Adafruit sells one of these converters. [Joe]’s board has another trick up its sleeve, though: it can give any microcontroller a high-resolution display, too.
There’s another module that connects to [Joe]’s breakout board that turns the LCD into an SPI display. This means any microcontroller can drive a high-resolution display. It’s fast, too: in the video below, [Joe]’s SPI display can push pixels at least as fast as any other microcontroller-based display we’ve seen.
It’s a great project, and a by opening up the doors to millions of cheap LCDs on eBay and Alibaba, [Joe] has a great entry for the Hackaday Prize on his hands.
Continue reading “Hackaday Prize Entry: Adding HDMI To Small Displays”