
Over the years we’ve been entertained by an array of musical projects from [Look Mum No Computer], and his latest is no exception. It’s a tape delay, loop generator, and synth all in one. Confused? That’s what you get if you position a load of tape heads around a rotating disk with magnetic tape on its perimeter.
Taking a circular piece of inch-thick Perspex, he wraps a length of one inch tape round its perimeter. This is placed as though it were a turntable on a stepper motor with variable speed, and the tape heads are positioned around its edge. Each read head feeds its own preamp which in turn drives a mixer array, and there’s also a record head and an erase head. If you’ve ever played with tape loops you’ll immediately understand the potential for feedback and sequence generation to make interesting sounds. There’s a lot of nuance to the build, in designing the mount for the motor to stop the enclosure flexing, in using a gearbox for increased torque, and in balancing the disk.
The result is as much an effect as it is an instrument in its own right, particularly in its prototype phase when the read head was movable. We’re treated to a demo/performance, and we look forward to perhaps seeing this in person at some point. There’s a future video promised in which a fix should come for a click caused by the erase circuitry, and he’ll make a more compact enclosure for it. Continue reading “Round And Round With A Tape Delay Synth”

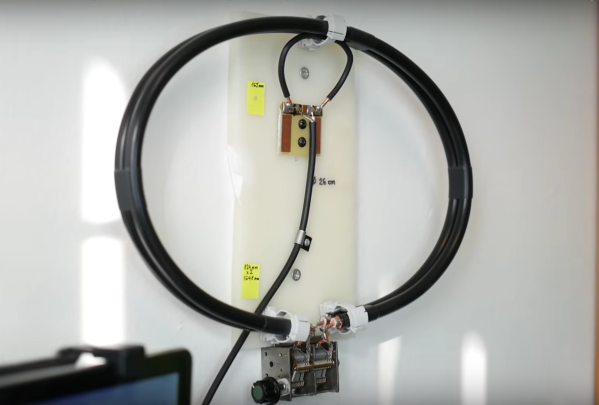




 To be honest, pretty much any chunk of wire will do as an antenna for most shortwave receivers. But not everyone lives somewhere where it’s possible to string up a hundred meters of wire and get a good ground connection, which could make a passive loop antenna like this a good choice. Plus, loops tend to cancel the electrical noise that’s so part of life today, which can make it easier to pull in weak, distant stations.
To be honest, pretty much any chunk of wire will do as an antenna for most shortwave receivers. But not everyone lives somewhere where it’s possible to string up a hundred meters of wire and get a good ground connection, which could make a passive loop antenna like this a good choice. Plus, loops tend to cancel the electrical noise that’s so part of life today, which can make it easier to pull in weak, distant stations.








