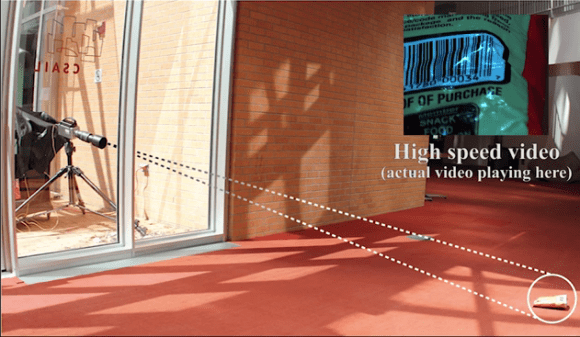
A Group of MIT, Microsoft, and Adobe researchers have managed to reproduce sound using video alone. The sounds we make bounce off every object in the room, causing microscopic vibrations. The Visual Microphone utilizes a high-speed video camera and some clever signal processing to extract an audio signal from these vibrations. Using video of everyday objects such as snack bags, plants, Styrofoam cups, and water, the team was able to reproduce tones, music and speech. Capturing audio from light isn’t exactly new. Laser microphones have been around for years. The difference here is the fact that the visual microphone is a completely passive device. No laser or special illumination is required.
The secret is in the signal processing, which the team explains in their SIGGRAPH paper (pdf link). They used a complex steerable pyramid along with wavelet filters to obtain local pixel motion values. These local values are averaged into a global motion value. From this global motion value the team is able to measure movement down to 1/1000 of a pixel. Plenty of resolution to decode audio data.
Most of the research is performed with high-speed video cameras, which are well outside the budget of the average hacker. Don’t despair though, the team did prove out that the same magic can be performed with consumer cameras, albeit with lower quality results. The team took advantage of the rolling shutter found in most of today’s CMOS imager based consumer cameras. Rolling shutter CMOS sensors capture images one row at a time. Each row can be processed in a similar fashion to the frames of the high-speed camera. There are some inter-frame gaps when the camera isn’t recording anything though. Even with the reduced resolution, it’s easy to pick out “Mary had a little lamb” in the video below.
We’re blown away by this research, and we’re sure certain organizations will be looking into it for their own use. Don’t pull out your tin foil hats yet though. Foil containers proved to be one of the best sound reflectors.
Continue reading “Focus Your Ears With The Visual Microphone”