One of the core lessons any physics student will come to realize is that the more you know about physics, the less intuitive it seems. Take the nature of light, for example. Is it a wave? A particle? Both? Neither? Whatever the answer to the question, scientists are at least able to exploit some of its characteristics, like its ability to bend and bounce off of obstacles. This camera, for example, is able to image a room without a direct light-of-sight as a result.
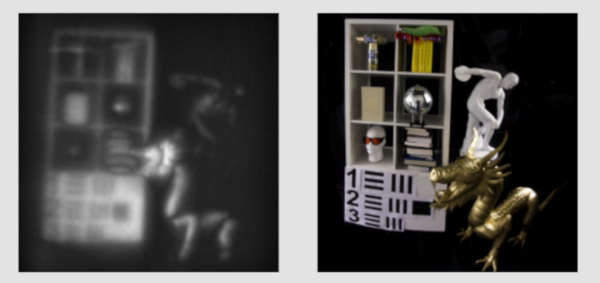
The process works by pointing a camera through an opening in the room and then strobing a laser at the exposed wall. The laser light bounces off of the wall, into the room, off of the objects on the hidden side of the room, and then back to the camera. This concept isn’t new, but the interesting thing that this group has done is lift the curtain on the image processing underpinnings. Before, the process required a research team and often the backing of the university, but this project shows off the technique using just a few lines of code.
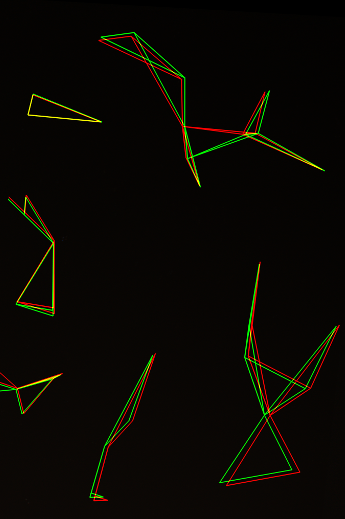
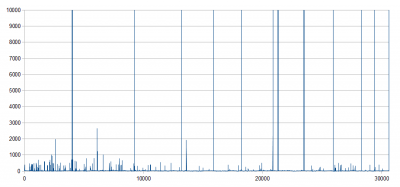
This project’s page documents everything extensively, including all of the algorithms used for reconstructing an image of the room. And by the way, it’s not a simple 2D image, but a 3D model that the camera can capture. So there should be some good information for anyone working in the 3D modeling world as well.
Thanks to [Chris] for the tip!