Just a few weeks ago in the Links article, we ran a story about Tanner Electronics, the Dallas-area surplus store that was a mainstay of the hacker and maker scene in the area. At the time, Tanner’s owners were actively looking for a new, downsized space to move into, and they were optimistic that they’d be able to find something. But it appears not to be, as we got word this week from James Tanner that the store would be shutting its doors after 40 years in business. We’re sad to see anyone who’s supported the hardware hacking scene be unable to make a go of it, especially after four decades of service. But as we pointed out in “The Death of Surplus”, the center of gravity of electronics manufacturing has shifted dramatically in that time, and that’s changed the surplus market forever. We wish the Tanner’s the best of luck, and ask those in the area to stop by and perhaps help them sell off some of their inventory before they close the doors on May 31.
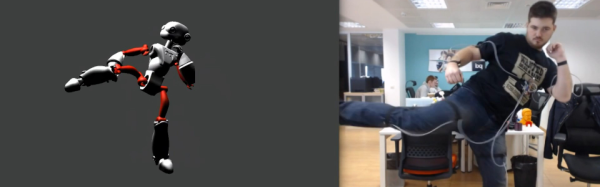
Feel like getting your inner Gollum on video but don’t know where to begin? Open source motion capture might be the place to start, and Chordata will soon be here to help. We saw Chordata as an entry in the 2018 Hackaday Prize; they’ve come a long way since then and are just about to open up their Kickstarter. Check out the video for an overview of what Chordata can do.
Another big name in the open-source movement has been forced out of the organization he co-founded. Eric S. Raymond, author of The Cathedral and the Bazaar and co-founder and former president of the Open Source Initiative has been removed from mailing lists and banned from communicating with the group. Raymond, known simply as ESR, reports that this was in response to “being too rhetorically forceful” in his dissent from proposed changes to OSD, the core documents that OSI uses to determine if software is truly open source. Nobody seems to be saying much about the behavior that started the fracas.
COVID-19, the respiratory disease caused by the newly emerged SARS-CoV-2 virus, has been spreading across the globe, causing panic and claiming lives. It’s not without its second-order effects either, of course, as everything from global supply chains to conferences and meetings have been disrupted. And now, coronavirus can be blamed for delaying the ESA/Russian joint ExoMars mission. The mission is to include a Russian-built surface platform for meteorological and biochemical surveys, plus the ESA’s Rosalind Franklin rover. Program scientists are no longer able to travel and meet with their counterparts to sort out issues, severely crimping productivity and forcing the delay. Social distancing and working from home can only take you so far, especially when you’re trying to get to Mars. We wonder if NASA’s Perseverance will suffer a similar fate.
Speaking of social distancing, if you’ve already decided to lock the doors and hunker down to wait out COVID-19, you’ll need something to keep you from going stir crazy. One suggestion: learn a new skill, like PCB design. TeachMePCB is offering a free rigid PCB design course starting March 28. If you’re a newbie, or even if you’ve had some ad hoc design experience, this could be a great way to productively while away some time. And if that doesn’t work for you, check out Bartosz Ciechanowski’s Gears page. It’s an interactive lesson on why gears look like they do, and the math behind power transmission. Ever wonder why gear teeth have an involute shape? Bartosz will fix you up.
Stay safe out there, everyone. And wash those hands!
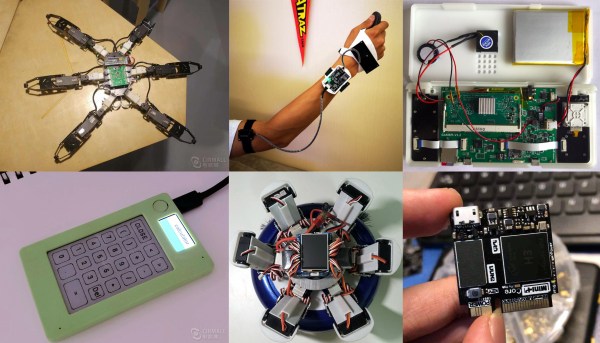


 Fifteen sensor boards, called K-Ceptors, are attached to various points on the body, each containing an LSM9DS1 IMU (Inertial Measurement Unit). The K-Ceptors are wired together while still allowing plenty of freedom to move around. Communication is via I2C to a Raspberry Pi. The Pi then sends the collected data over WiFi to a desktop machine. As you move around, a 3D model of a human figure follows in realtime, displayed on the desktop’s screen using Blender, a popular, free 3D modeling software. Of course, you can do something else with the data if you want, perhaps make a robot move? Check out the overview and the performance by a clearly experienced dancer putting the system through its paces in the video below.
Fifteen sensor boards, called K-Ceptors, are attached to various points on the body, each containing an LSM9DS1 IMU (Inertial Measurement Unit). The K-Ceptors are wired together while still allowing plenty of freedom to move around. Communication is via I2C to a Raspberry Pi. The Pi then sends the collected data over WiFi to a desktop machine. As you move around, a 3D model of a human figure follows in realtime, displayed on the desktop’s screen using Blender, a popular, free 3D modeling software. Of course, you can do something else with the data if you want, perhaps make a robot move? Check out the overview and the performance by a clearly experienced dancer putting the system through its paces in the video below.
 In fairness, what [Mark Rober] started three years ago seemed like a pretty simple task. He wanted to build a rig to move the dartboard’s bullseye to meet the predicted impact of any throw. Seems simple, but it turns out to be rather difficult, especially when you choose to roll your own motion capture system.
In fairness, what [Mark Rober] started three years ago seemed like a pretty simple task. He wanted to build a rig to move the dartboard’s bullseye to meet the predicted impact of any throw. Seems simple, but it turns out to be rather difficult, especially when you choose to roll your own motion capture system.