There’s a theory that the fear of scurrying things is genetic. Likewise, a similar theory arose about the tendency for humans to find helpless things cute. After all, our useless babies do best in a pest free environment. This all could explain why we found this robotic roach to be both a little cute and a little creepy.
The university sponsored project, JumpRoaCH, is a collaboration between South Korea’s SNU Biorobotics Lab and Berkeley’s Biomimetic Millisystems Lab. Imitating insects has been a popular avenue for robotic research, and often results in very interesting experiments.
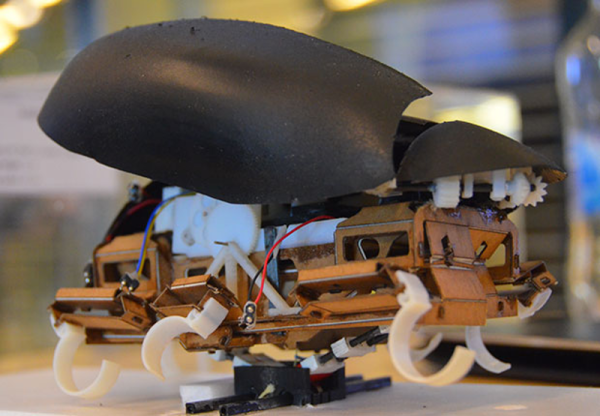
This robot looks like a ladybug going through its rebellious teen phase. It runs on six hook shaped legs which allow it to traverse a wider array of surfaces than wheels would, at the expense of speed and higher vibrations. The robot does a very convincing, if wobbly, scurry across the surface of its test table.
It also has a secret attack in the form of a single Rockem Sockem Robot arm located on its belly. With a powerful burst, the arm can launch the robot up a few feet to a higher surface. If the robot lands on its wheels the researchers high-five. If the robot lands on its back, it can use its ,”wings,” to flip itself right-side-up again.
The resulting paper (PDF file) has a nice description of the robot and its clever jumping mechanism. At least if these start multiplying like roaches, hackers will never short for tiny motors for their projects. Video after the break.
Continue reading “JumpRoaCH Is Kind Of Cute, Kind Of Creepy”
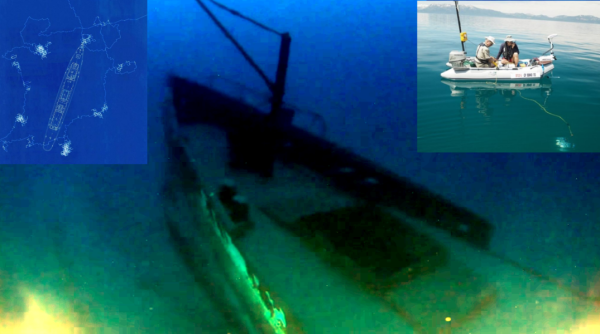
![DIY Research Vessel in use, while ROV is busy below. [Source: NYT]](https://hackaday.com/wp-content/uploads/2016/07/openrov-top-end2.jpg?w=250)