We’re not sure what kind of, “High School,” [Sam Baumgarten] and [Graham Hughes] go to that gave them the tools to execute their robotic gripper so well. We do know that it was not like ours. Apparently some high schools have SLS 3D printers and Solidworks. Rather than a grumpy shop teacher with three fingers who, despite that, kept taking the safety off the table saws and taught drafting on boards with so many phalluses and names carved into the linoleum, half the challenge was not transferring them to the line work.
Our bitterness aside, [Sam] and [Graham] built a pretty dang impressive robotic gripper. In fact, after stalking [Sam]’s linkedin to figure out if he was the teacher or the student, (student) we decided they’re bright enough they could probably have built it out of scraps in a cave. Just like [HomoFaciens], and Ironman.
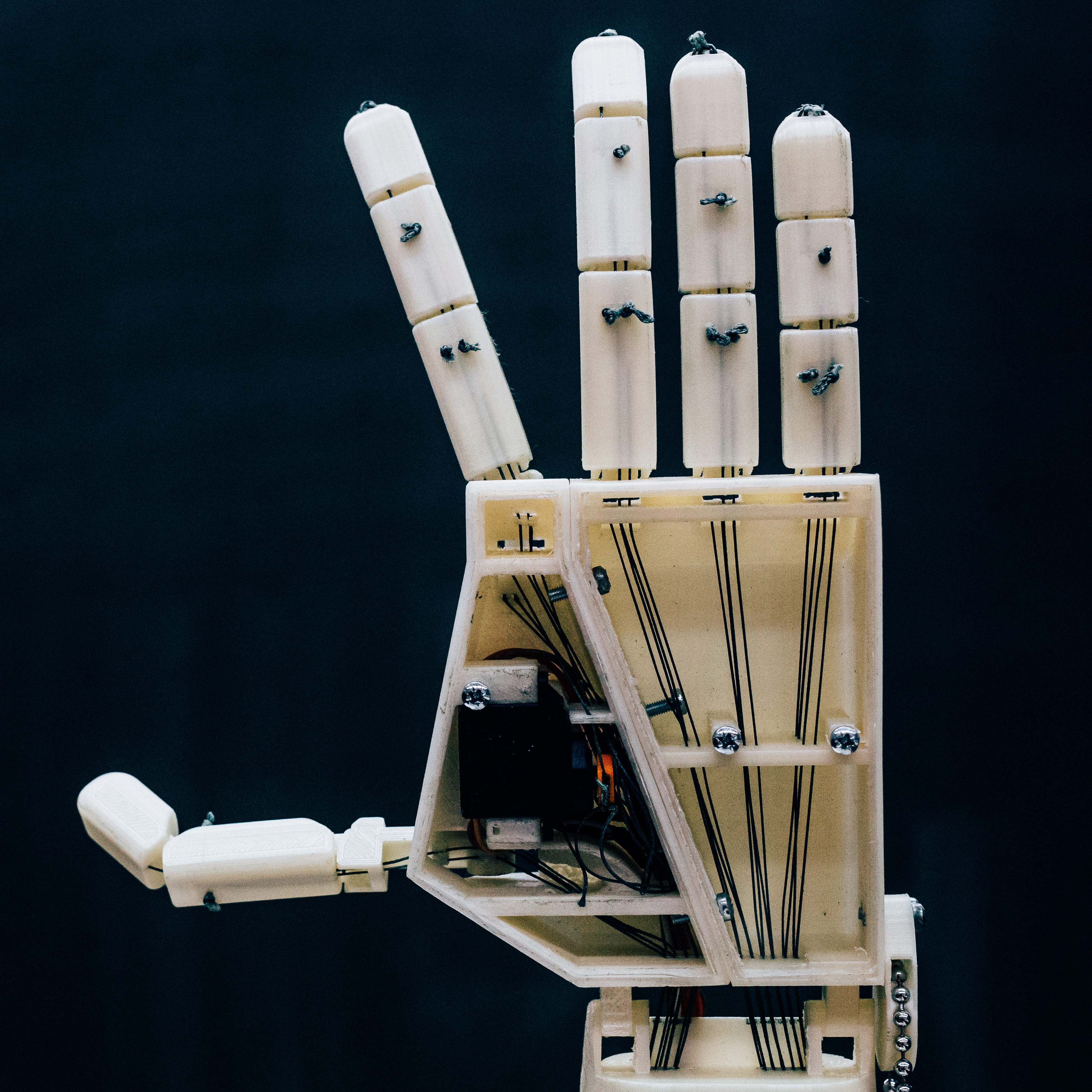
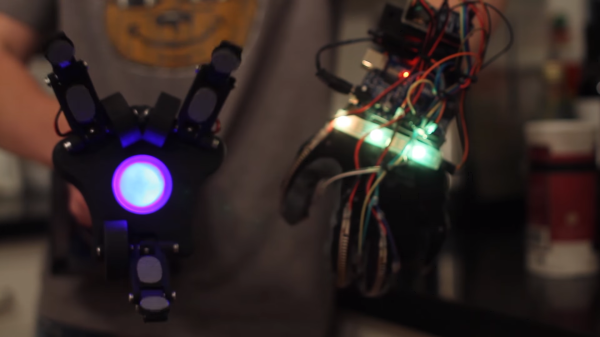
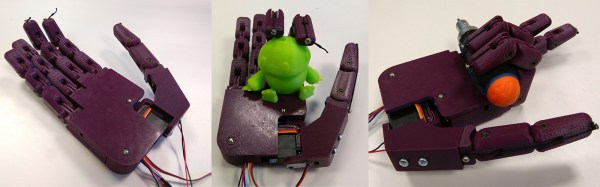
The gripper itself is three large hobby servos joined to the fingers with a linkage, all 3D printed. The mechanical fingers have force sensors at the contact points and the control glove has tiny vibrating motors at the fingertips. When the force of the grip goes up the motors vibrate more strongly, providing useful feedback. In the video below you can see them performing quite a bunch of fairly fine motor skills with the gripper.
The gripper is mounted on a pole with some abrasive tape, the kind found on skateboard decks. At the back of the pole, the electronics and batteries live inside a project box. This provides a counterbalance to the weight of the hand.
The control glove has flexible resistors on the backs of the fingers. The signal from these are processed by an Arduino which transmits to its partner arduino in the gipper via an Xbee module.
[Sam] and [Graham] did a great job. They worked through all the design stages seen in professional work today. Starting with a napkin sketch they moved onto digital prototyping and finally ended up with an assembly that worked as planned. A video after the break explaining how it works along with a demo video.
Continue reading “Wireless Robotic Gripper With Haptic Feedback” →


 A team of students in Antwerp, Belgium are responsible for
A team of students in Antwerp, Belgium are responsible for