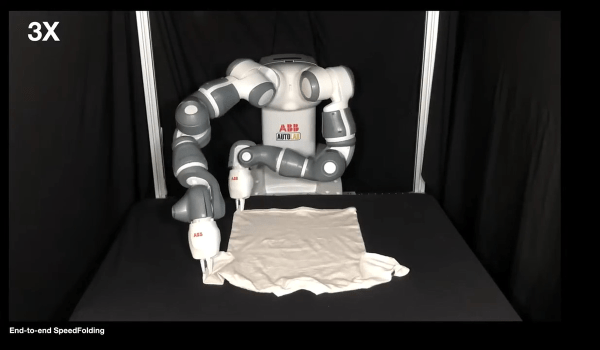
Al Williams wrote up a neat thought piece on why we are so fascinated with robots that come in the shape of people, rather than robots that come in the shape of whatever it is that they’re supposed to be doing. Al is partly convinced that sci-fi is partly responsible, and that it shapes people’s expectations of what robots look like.
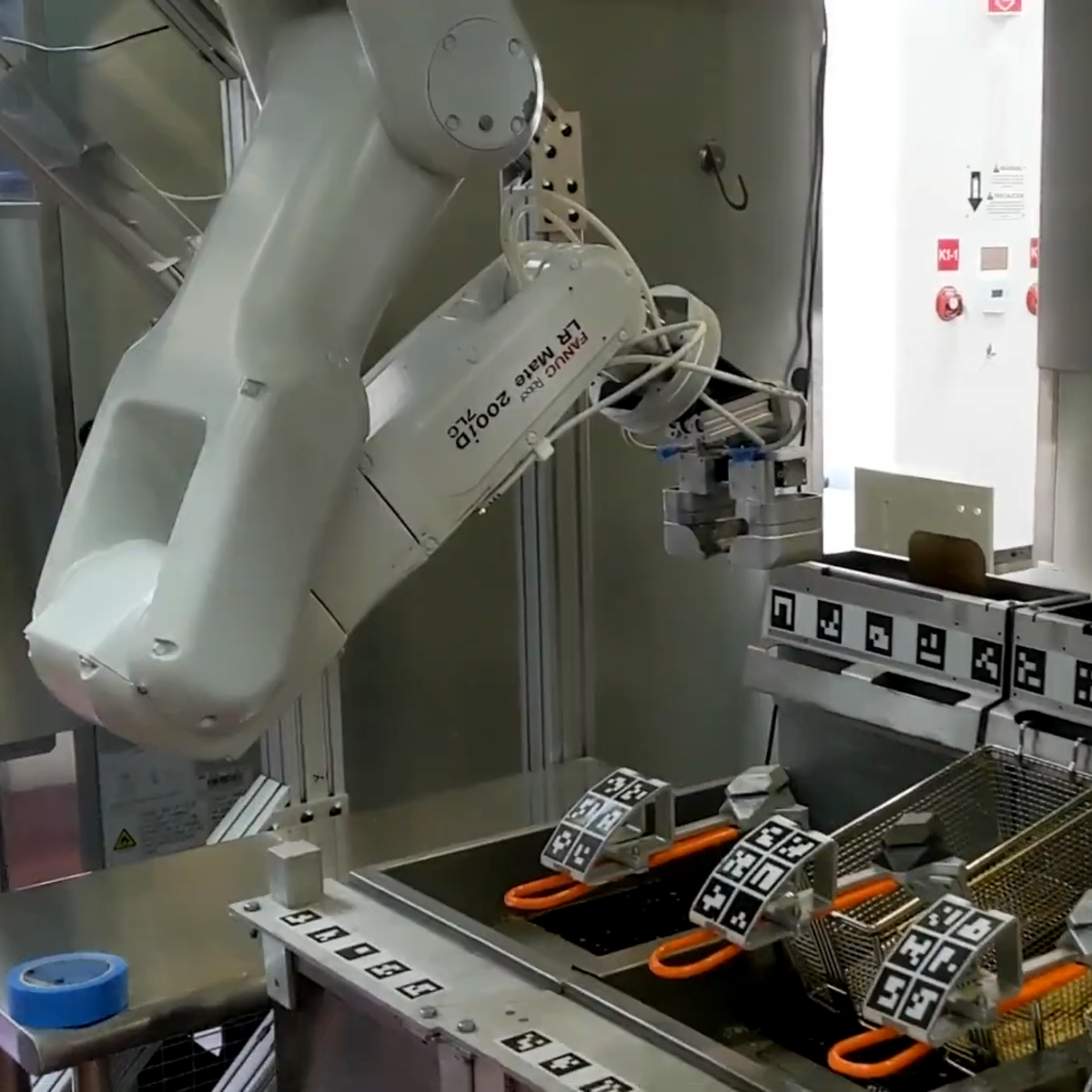
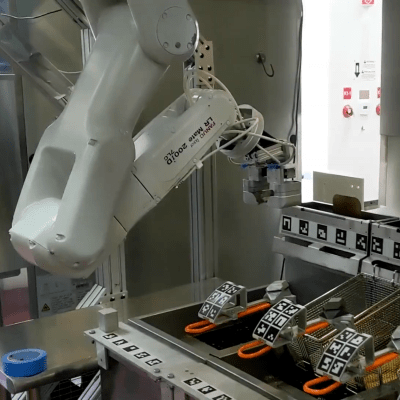 What sparked the whole thought train was the ROAR (robot-on-a-rail) style robot arms that have been popping up, at least in the press, as robot fry cooks. As the name suggests, it’s a robot arm on a rail that moves back and forth across a frying surface and uses CV algorithms to sense and flip burgers. Yes, a burger-flipping robot arm. Al asks why they didn’t just design the flipper into the stovetop, like you would expect with any other assembly line.
What sparked the whole thought train was the ROAR (robot-on-a-rail) style robot arms that have been popping up, at least in the press, as robot fry cooks. As the name suggests, it’s a robot arm on a rail that moves back and forth across a frying surface and uses CV algorithms to sense and flip burgers. Yes, a burger-flipping robot arm. Al asks why they didn’t just design the flipper into the stovetop, like you would expect with any other assembly line.
In this particular case, I think it’s a matter of economics. The burger chains already have an environment that’s designed around human operators flipping the burgers. A robot arm on a rail is simply the cheapest way of automating the task that fits in with the current ergonomics. The robot arm works like a human arm because it has to work in an environment designed for the human arm.
Could you redesign a new automatic burger-flipping system to be more space efficient or more reliable? Probably. If you did, would you end up with a humanoid arm? Not necessarily. But this is about patching robotics into a non-robotic flow, and that means they’re going to have to play by our rules. I’m not going to deny the cool factor of having a robot arm flip burgers, but my guess is that it’s actually the path of least resistance.
It feels kind of strange to think of a sci-fi timeline where the human-looking robots come first, and eventually get replaced by purpose-built intelligent machines that look nothing like us as the environments get entire overhauls, but that may be the way it’s going to play out. Life doesn’t always imitate art.