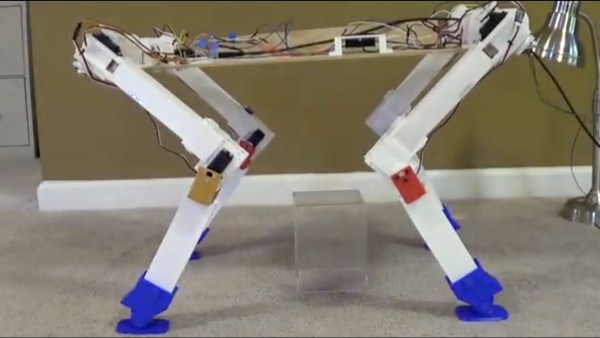
Humans can traverse pretty much any terrain thanks to their legs and fast-acting balancing system. So if you want a robot which should have equal flexibility, legs are a good way to go, this confirmed by all the achievements of Boston Dynamics’ robots. It was therefore natural for [Mike Rigsby] to model his robot dog after Boston Dynamics’ dog-like robot, SpotMini.
The build log on his Hackaday.io page makes for interesting reading. For example, he started out with the legs oriented like SpotMini but found that when trying to stand, the front legs worked fine but the rear ones slid or the dog shifted rearward or both happened. His solution was to take a cue from his 1990s Sony robot dog, Aibo, by reversing the orientation of the rear legs. He then upgraded his servo motors to ones with double the torque and increased the strength of the legs’ structure. In the first video below, you can see that his dog now lifts itself up to a standing position perfectly.
So far, to give it more of a dog-like personality he’s mounted Google’s AIY Vision Kit which changes a light’s color based on the degree to which a person is smiling, though we think a wagging tail would work well too. The possibilities are endless but one step at a time. See the second video below for a demonstration of the use of the Vision Kit.
Continue reading “Mike’s Robot Dog Is A First Step In The Right Direction”