[Leo Goldstien]’s entry into the world of robotics has been full of stops and starts. Like many beginners, he found traditional robotics instructions overwhelming and hard to follow, bogged down with dense math that often obscured the bigger picture. So he decided to approach things differently and create something with his own hands. The result? A 3D-printed robotic arm he affectionately calls “ManiPilator.”
This article is the first in a three-part series documenting [Leo]’s hands-on approach to learning robotics from the ground up. Building ManiPilator became an opportunity to learn by doing, and the project took him on a journey of experimenting, failing, and eventually succeeding in tasks that seemed deceptively simple at first glance. Each hurdle provided him with insights that more traditional learning methods hadn’t delivered. Below is one of the videos [Leo] captured, to show one step in the process: doing a check using multiple motors.
To make his project work, [Leo] relied on open-source software like Klipper, piecing together code and hardware in a way that made sense to him. In sharing his story, he offers fellow beginners an approachable perspective on robotics, with practical insights and candid reflections on the challenges and breakthroughs.
[Leo]’s project shows that there’s more than one way to start exploring robotics, and that sometimes the best way to learn is simply to dive in and start building. Follow along with his journey as he tackles the complexities of robotics, one step at a time.
Continue reading “Tinkering With Klipper: Making The ManiPilator Robotic Arm”






 their lifespan. While the concept of food-based robots may seem unusual, the potential applications in medicine and reducing waste during food delivery are significant driving factors behind this idea.
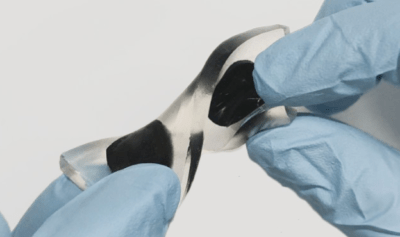
their lifespan. While the concept of food-based robots may seem unusual, the potential applications in medicine and reducing waste during food delivery are significant driving factors behind this idea. activated charcoal (AC) electrodes on a gelatin substrate. Water is split into its constituent oxygen and hydrogen by applying a voltage to the structure. These gasses adsorb into the AC surface and later recombine back into the water, providing a usable one-volt output for ten minutes with a similar charge time. This simple structure is reusable and, once expired, dissolves harmlessly in (simulated) gastric fluid in twenty minutes. Such a device could potentially power a GI-tract exploratory robot or other sensor devices.
activated charcoal (AC) electrodes on a gelatin substrate. Water is split into its constituent oxygen and hydrogen by applying a voltage to the structure. These gasses adsorb into the AC surface and later recombine back into the water, providing a usable one-volt output for ten minutes with a similar charge time. This simple structure is reusable and, once expired, dissolves harmlessly in (simulated) gastric fluid in twenty minutes. Such a device could potentially power a GI-tract exploratory robot or other sensor devices.