[Joshua Clay] recently unveiled his newest RC Nerf Dart Robot and talks through his design choices, pointing out that in his aim to have it launch darts fast and hard he may have somewhat overshot the mark. He found out first hand during testing that it shoots hard enough to leave welts through a sweatshirt and probably should be downgraded a bit. Thankfully, one of the features of his new unit is a highly modular design that makes iterating easier than ever.
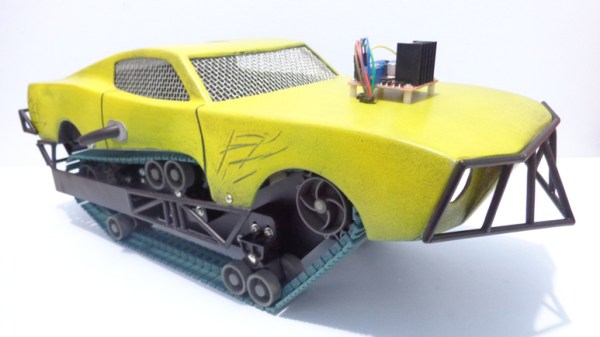
This model is an evolution of his first Nerfbot, and the new one is a smaller, tighter design that trades a wheeled base for a tracked one, among other changes.
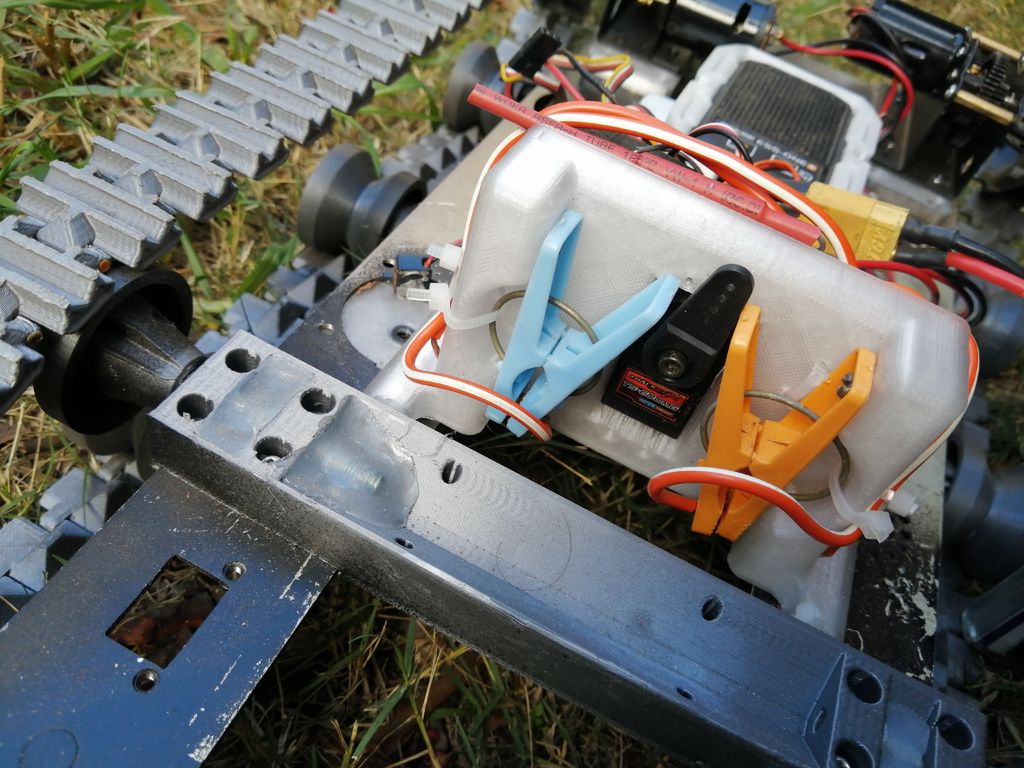
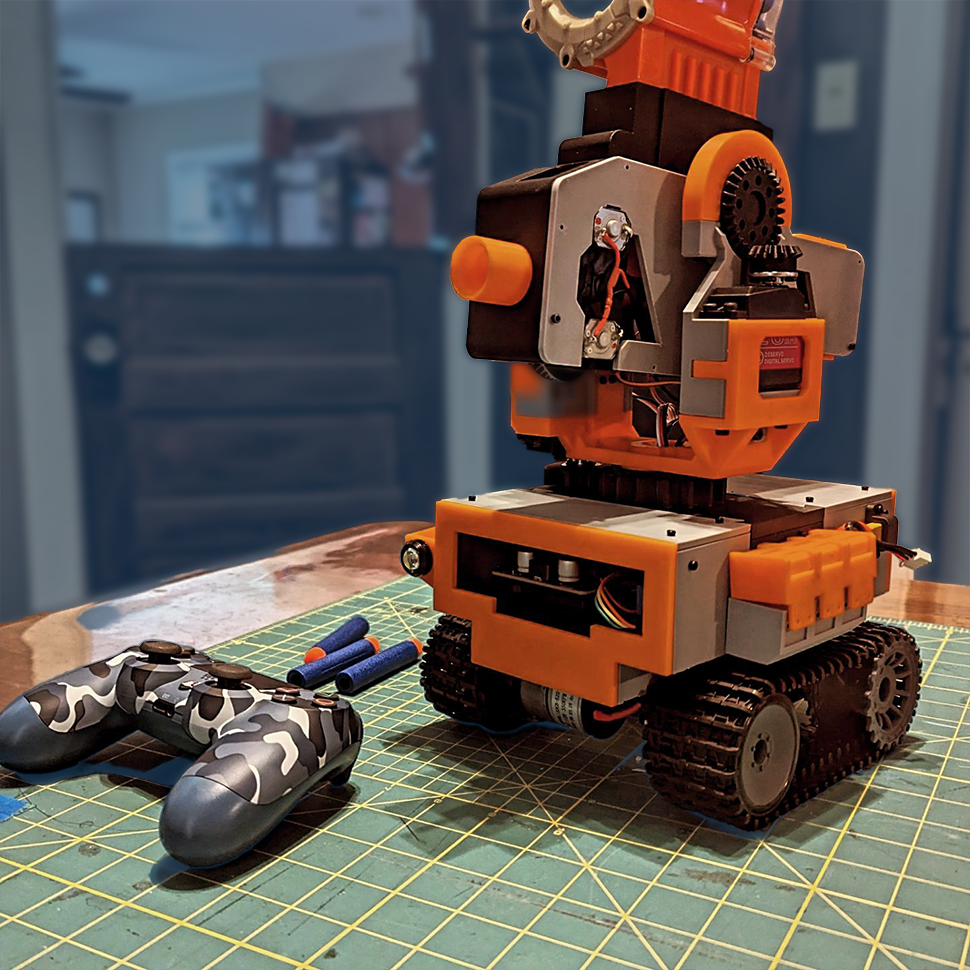
The tank platform is one example of [Joshua] using affordable, off-the-shelf solutions where it makes sense to do so. For example, the inexpensive tank-track platform means he can focus on the rest of the bot without having to design or make his own tank treads. Similarly, to control the bot he opts for a PlayStation 4 controller, paired to the bot over Bluetooth. It’s high quality, inexpensive, commonly available, and easily interfaced with the RP2040 that runs the show.
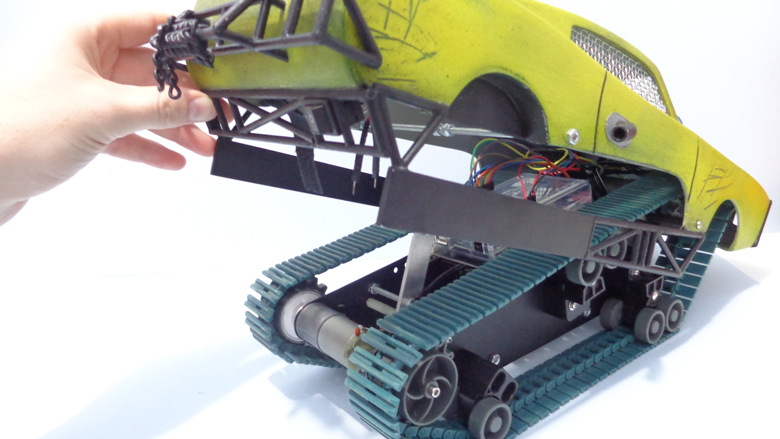
[Joshua] aims for a modular, LEGO-inspired mechanical assembly that makes maintenance, wiring, and iteration as easy as possible. We especially like how the battery, wiring, and things like gears for the pan-and-tilt mechanism of the Nerf launcher are easily accessible.
The dart launcher uses two flywheels to grip and propel each dart fed from a high-capacity magazine, and you can watch it move and shoot around the 9:44 mark in the video, embedded below. It’s plenty loud, but the camera is barely able to register darts leaving the barrel.
If you like the looks of [Joshua]’s newest Nerfbot, keep an eye out because he’s got more to share about it and is considering other features like a camera. In the meantime, there are a few more photos on his website.