Although [Jamie’s Brick Jams] has made many far more complicated motor design in the past, it’s nice to go back to the basics and make a motor that uses as few parts as possible. This particular design starts off with a driver coil and a magnetic rotor that uses two neodymium magnets. By balancing these magnets on both sides of an axis just right it should spin smoothly.
First this driver coil is energized with a 9 V battery to confirm that it does in fact spin when briefly applying power, though this means that you need to constantly apply pulses of power to make it keep spinning. To this end a second coil is added, which senses when a magnet passes by.
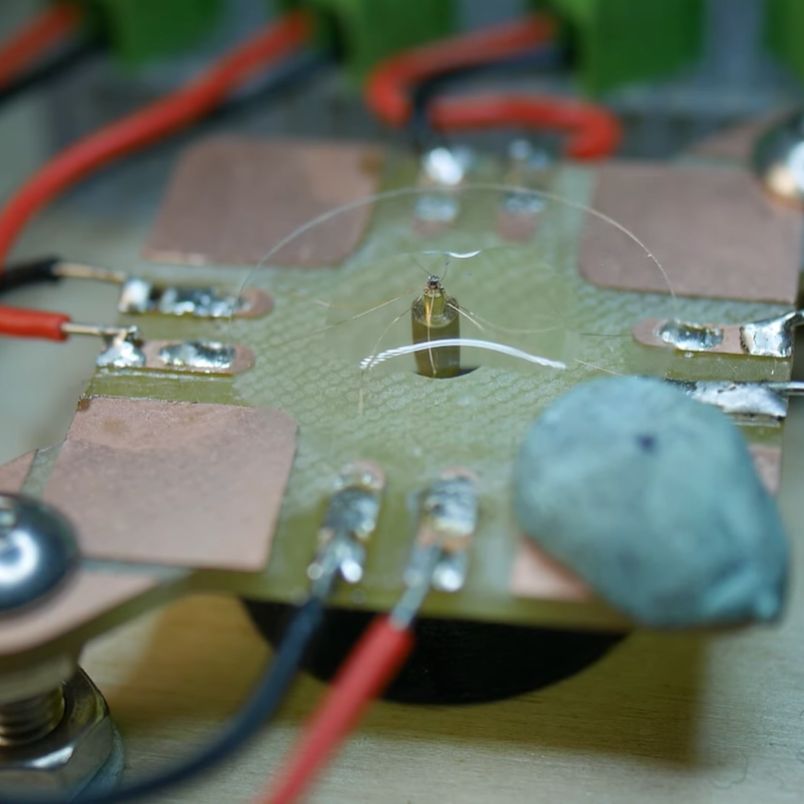
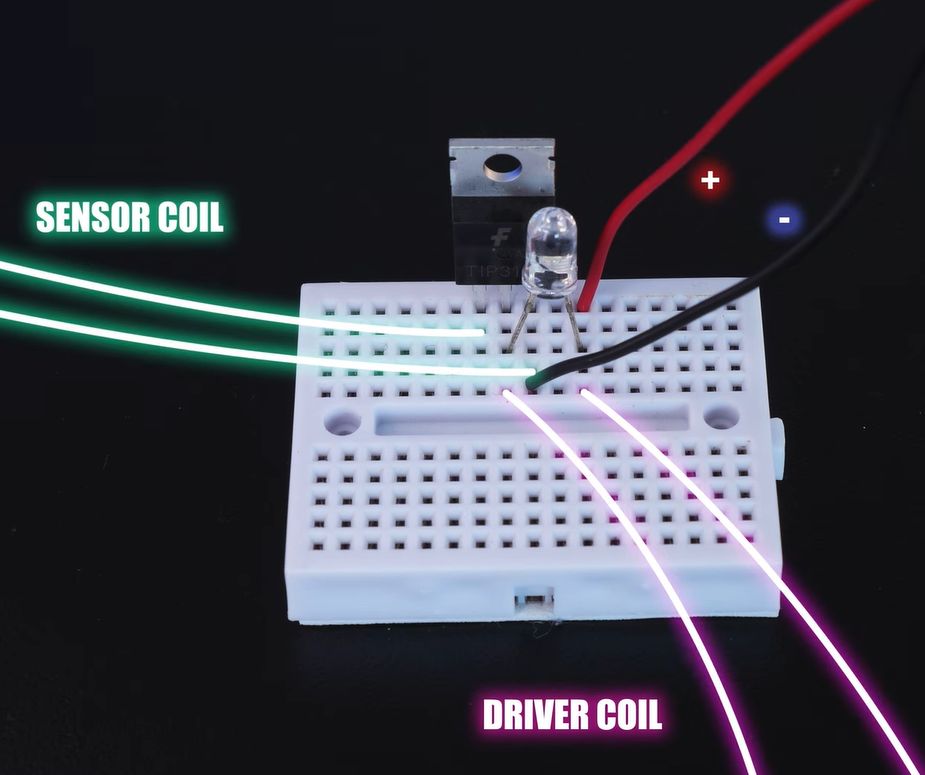
This sense coil is connected to a small circuit containing a TIP31C NPN power transistor and a LED. While the transistor is probably overkill here, it’ll definitely work. The circuit is shown in the image, with the transistor pins from left to right being Base-Collector-Emitter. This means that the sensor coil being triggered by a passing magnet turns the transistor on for a brief moment, which sends a surge of power through the driver coil, thus pushing the rotor in a typical kicker configuration.
Obviously, the polarity matters here, so switching the leads of one of the coils may be needed if it doesn’t want to spin. The LED is technically optional as well, but it provides an indicator of activity. From this basic design a larger LEGO motor is also built that contains many more magnets in a disc along with two circular coils, but even the first version turns out to be more than powerful enough to drive a little car around.
Continue reading “Building The Most Simple Motor In Mostly LEGO”