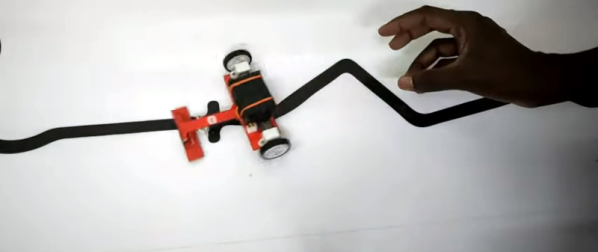
Sometimes a coworker sees something on your desk, and they have to ask, “Where can I get one of those?” and that has to be one of the greatest compliments to a maker. [Greg Zumwalt] nailed it with his “Marblevator Line Follower.” Roboticists will immediately recognize a black line on a white surface, but this uses hidden mechanics instead of light/dark sensors. Check out the video after the break to see the secrets, or keep bearing with us.
Inside the cylinder is a battery, charging circuit, inductive receiving coil, and a motor turning a magnet-laden arm beneath the cap. The overall effect is an illusion to convince people that the marble has a mind of its own. You can pick up the cylinder, and it keeps moving as expected from an autonomous bot. The black line is actually a groove, so the bearing follows a curvy course without any extra movements from the magnets within. The two-tone look is super-clean, but the whimsy of a “smart bearing” makes this an all-around winner.
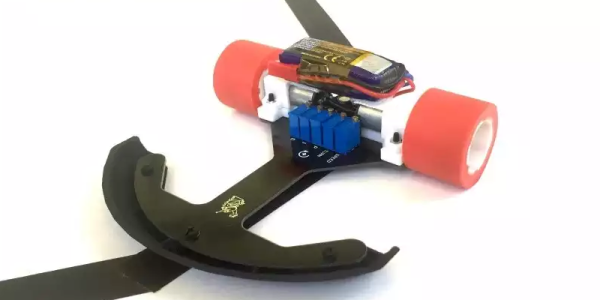
A line follower is a common project for anyone wishing to make a start in robotics, a small wheeled device usually with some kind of optical sensor which allows it to follow a line drawn on the surface over which it runs. In most cases they incorporate a small microcontroller or perhaps an analogue computer which supplies power and steering control, but as the Crayon Car from [Greg Zumwalt] demonstrates, it’s possible to make a line follower without any brains at all.
This seemingly impossible feat is achieved thanks to the line and road surface, it runs on a piece of paper over which the line is drawn with a crayon. The robot has a single straight-line drive wheel at one end and a pair of driven rollers at 90 degrees to each other at the other end, with the magic happening due to the difference in friction between paper and crayon. The robot follows a circular track with no problem, and while we can see it’s not without flaws we doubt it would be possible to make a simpler follower.
While a line-following robot may not be the newest project idea in the book, this one from [Edison Science] is a clean build using modern components and gets a good speed thanks to PID control feedback instead of the more traditional bang-bang control you see in low-end robots.
Of course, PIDs need tuning and that seems to be the weak link — you’ll have to experiment with the settings. The sensors also require calibration, but we bet both of those issues could be fixed pretty easily.
Line Followers are a tried-and-true type of robot; both hardware and software need to be doing their job in harmony in order to be successful at a clearly defined physical task. But robots don’t always have microcontrollers and software, as [Mati_DIY]’s zero programming analog line follower demonstrates.
For readers used to seeing a Raspberry Pi or Arduino in almost everything, an analog robot whose “programming” exists only as a harmony between its discrete parts can be an eye-opener as well as an accessible project. A video of the robot in action is embedded below.
[Mati_DIY]’s design uses two CNY70 reflective sensors (which are essentially infrared emitter/phototransistor pairs) and an LM358 dual op-amp. Together, the sensors act as two near-sighted eyes. By using the output of each sensor to drive a motor via a transistor, the presence or absence of the black line is directly and immediately reflected by the motion of the attached motor. The more black the sensor sees, the more the motor turns. Electrically, that’s all that happens; but by attaching the right sensor to the left motor and the left sensor to the right motor, you get a robot that always tries to keep the black line centered under the sensors. Playing with the spacing of the motors and sensors further tweaks the performance.
There’s hardly a day that passes without an Arduino project that spurs the usual salvo of comments. Half the commenters will complain that the project didn’t need an Arduino. The other half will insist that the project would be better served with a much larger computer ranging from an ARM CPU to a Cray.
[Will Moore] has been interested in BEAM robotics — robots with analog hardware instead of microcontollers. His latest project is a sophisticated line follower. You’ve probably seen “bang-bang” line followers that just use a photocell to turn the robot one way or the other. [Will’s] uses a hardware PID (proportional integral derivative) controller. You can see a video of the result below.
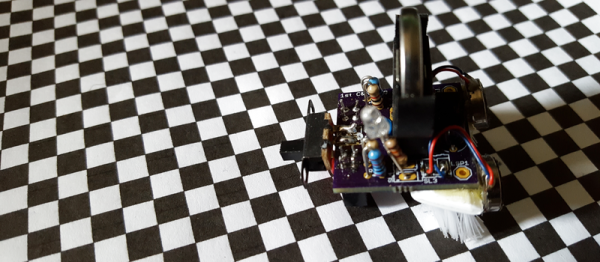
It’s been a while since we’ve seen much action on the bristlebot front, which is too bad. So we’re happy to see [Extreme Electronics]’s take on the classic introductory “robot”: the Black Line Follower. The beauty of these things is their simplicity, so we’ll just point you to his build instructions and leave the rest to you.
The original bristlebot is a fantastic introduction to electronics, because it’s simple enough that you can cobble one together in no time. A battery, a pager motor, and a toothbrush head are all you need. But it goes where it wants, rather than where you want it to go.
Adding steering is as simple as tying two bristlebots together and firing one motor at a time to execute a turn. The Black Line Follower is of this style.
But that was more than five years ago now. What happened to the mighty engines of bristlebot creativity? Has the b-bot seen its finest hour? Or are we just waiting for the next generation to wiggle up to the plate?
LVBots, a club for robot building enthusiasts in Las Vegas, held an open house the week of CES. This was the only trip [Sophi] and I took away from the conference halls of The Strip and it was a blast! The group holds meetings twice a month in a space provided by Pololu — a well-known robotics and electronics manufacturer headquartered just south of McCarran International Airport.
[Claire] demonstrating robotic closet demo and app
The mechanized racks of the automated closet
Line-following robot demonstration
Sumo robots about to rumble
Before the formal part of the gathering started there were several builds being shown off. [Claire] and [Brian] recently participated in an AT&T sponsored hackathon. Their creation is a robotic closet. The system involves moving racks of clothing which are tracked by a smartphone app. Interesting features discussed for the software include monitoring when each garment was last worn, last washed, and if it is appropriate for current weather conditions. Dig into the code in their repo.
In other parts of the room a pair of line-following robots did their thing, and a couple of sumo-bots competed to push each other out of the ring. A large group was gathered around the projector watching videos of robots of all types, brainstorming about the difficult parts, how they were overcome, and how these methods may be applied to their own build. I can attest that hanging with a group of people who are trying to cue up the most amazing robot demonstrations makes for amazing viewing!
As the organized part of the meeting began I was delighted to hear about a standing challenge from the LVbots group. The Tabletop challenge has multiple phases that serve to encourage builders to start modestly and then iterate to achieve new goals:
Phase 0: bring a robot to LVBots
Phase 1: travel back and forth without falling off
Phase 2: find an object and push it off
Phase 3: push object into a goal
[Nathan Bryant] and robot
[Joe Carson] and robot
[Nathan Bryant] was one of the two robot builders trying out the challenge on this night. He built this hexapod from balsa wood and three servo motors and was testing Phase 1. The bot includes a sensor dangling out in front of the robot to detect then the table surface is no long below. At that point it backs up a few steps, turns in place, and proceeds in the opposite direction. [Nathan] mentions that he worked out all the movements in a spreadsheet and that future firmware upgrades will dramatically increase the speed at which the bot moves. We love the audible cadence of the bot which is easily observed in the video above. At one point a leg dangles over the edge and it looks like [Nathan] pushed the bot back but I don’t remember him actually touching it so I’m calling this a trick of camera angle.
One phase further in the Tabletop Challenge is [Joe Carson]. He exhibited a wheeled robot he’s been working on that includes a gripper arm on the front. The robot looks around the table for a predefined color, in this case provided by a highlighting marker. When found the bot approaches, grips, and then proceeds to move the marker over the void where it is dropped out of existence; at least from the robot’s point of view.




![[Claire] demonstrating robotic closet demo and app](https://i0.wp.com/hackaday.com/wp-content/uploads/2015/01/dsc_0378.jpg?w=540&h=360&ssl=1 "DSC_0378")



![[Nathan Bryant] and robot](https://i0.wp.com/hackaday.com/wp-content/uploads/2015/01/dsc_03961.jpg?w=530&h=353&ssl=1 "DSC_0396")

![[Joe Carson] and robot](https://i0.wp.com/hackaday.com/wp-content/uploads/2015/01/dsc_0390.jpg?w=262&h=174&ssl=1 "DSC_0390")










