There’s a laundry list of ways that humans are polluting the earth, and even though it might not look like it from the surface, the oceans seem to bear the brunt of our waste. Some research suggests that plastic doesn’t fully degrade as it ages, but instead breaks down into smaller and smaller bits that will be somewhere the in environment for such a long time it could be characterized in layman’s terms as forever.
Not only does waste of all kinds make its way to the oceans by rivers or simply by outright dumping, but commercial fishing gear is estimated to comprise around 10% of the waste in the great blue seas, and one of the four nonprofits help guide this year’s Hackaday Prize is looking to eliminate some of that waste and ensure it doesn’t cause other problems for marine life. This was the challenge for the Conservation X Labs dream team, three people who were each awarded a $6,000 micro-grant to work full time for two months on the problem.
It isn’t about simply collecting waste in the ocean, but rather about limiting the time that potentially harmful but necessary fishing equipment is in the water in the first place. For this two-month challenge, this team focused on long lines used by professional fishing operations to attach buoys to gear like lobster pots or crab traps. These ropes are a danger to large ocean animals such as whales when they get tangled in them and, if the lines detach from the traps, the traps themselves continue to trap and kill marine life for as long as they are lost underwater. This “ghost gear” is harmful in many different ways, and reducing its time in the water or “soak time” was the goal for the project.
Let’s take a closer look at their work after the break, and we can also see the video report they filed as the project wrapped up.
GPS is available on most smart phones, which is all well and good unless you drive out into a place with weak service. Unless you want to go into the before-time and buy a standalone GPS (and try to update the maps every so often) or go even further back and print out MapQuest directions, you’ll need another solution to get directions. Something like this project which sends Google Maps directions over SMS.
The project is called RouteMe by [AhadCove]. It runs on a Raspberry Pi at his home which is constantly monitoring an email inbox. Using Google Voice to forward incoming text messages as emails to the Pi, the system works when your phone has a cell signal but no data connection. The Pi listens for specific commands in that SMS-to-Email connection and is able to send directions back to the phone via text message. That’s actually a neat hack you may remember from the olden days where you can send email as SMS using the phone number as the address.
If you find yourself lost in the woods with just your phone often enough, [AhadCove] has all of the code and detailed directions on how to set this up on his GitHub site. But don’t discount this particular task, anything you can script on the Pi can now be controlled via SMS without relying on a service like Twilio.
This maps hack is a pretty ingenious solution to a problem that more than a few of us have had, and it uses a lot of currently-available infrastructure to run as well. If you want another way of navigating without modern tech, have a go at dead reckoning in a car.
If you carry a smartphone around in your pocket, you have a GPS navigation system, a compass, an altimeter, and a very powerful computer at your fingertips. It’s the greatest navigational device ever created. To use this sextant of the modern era you’ve got to look down at a screen. You need to carry a phone around with you. It’s just not natural.
For this entry into the Hackaday Prize, [Vojtech Pavlovsky] has an innovative solution to direction finding that will give you a sixth sense. It’s a headband that turns your temples into the input for a clever way to find yourself around the city or a forest, and it does it with just an Arduino and a few other bits.
The idea behind the Ariadne Headband is to create a haptic navigation system for blind people, runners, bikers, or really anybody. It does this by mounting four vibration motors on a headband, connecting those motors to an Arduino, sniffing data from a digital compass, and getting data over Bluetooth from an Android app.
All of these parts come together to form a new sense — a sense of direction. By simply telling the app to make sure you’re always oriented North, or to guide you along the grid of city streets, this headband becomes an inconspicuous and extraordinarily useful way to get around.
How do you audit your home Wi-Fi network? Perhaps you log into your router and have a look at the connected devices. Sometimes you’ll find an unexpected guest, but a bit of detective work will usually lead you to the younger nephew’s game console or that forgotten ESP8266 on your bench.
Wouldn’t it be useful if your router could tell you where all the devices connected to it are? If you are [Zack Scholl], you can do all this and more, for his FIND-LF system logs Wi-Fi probe requests from all Wi-Fi devices within its range even if they are not connected, and triangulates their position from their relative signal strengths across several sniffing receivers. These receivers are a network of Raspberry Pis with their own FIND-LF server, and any probe requests they pick up are forwarded to [Zack]’s FIND server (another of his projects) which does the work of collating the locations of devices.
It’s an impressive piece of work, though with a Raspberry Pi at each receiver it could get a little pricey. [Zack] has done other work in this field aside from the two projects mentioned here, his other work includes an implementation of the [Harry Potter] Marauder’s Map.
The HTC Vive is a virtual reality system designed to work with Steam VR. The system seeks to go beyond just a headset in order to make an entire room a virtual reality environment by using two base stations that track the headset and controller in space. The hardware is very exciting because of the potential to expand gaming and other VR experiences, but it’s already showing significant potential for hackers as well — in this case with robotics location and navigation.
Autonomous robots generally utilize one of two basic approaches for locating themselves: onboard sensors and mapping to see the world around it (like how you’d get your bearings while hiking), or sensors in the room which tell the robot where it is (similar to your GPS telling you where you are in the city). Each method has its strengths and weaknesses, of course. Onboard sensors are traditionally expensive if you need very accurate position data, and GPS location data is far too inaccurate to be of use on a smaller scale than city streets.
[Limor] immediately saw the potential in the HTC Vive to solve this problem, at least for indoor applications. Using the Vive Lighthouse base stations, he’s able to locate the system’s controller in 3D space to within 0.3mm. He’s then able to use this data on a Linux system and integrate it into ROS (Robot Operating System). [Limor] hasn’t yet built a robot to utilize this approach, but the significant cost savings ($800 for a complete Vive, but only the Lighthouses and controller are needed) is sure to make this a desirable option for a lot of robot builders. And, as we’ve seen, integrating the Vive hardware with DIY electronics should be entirely possible.
Robots of the future will be in the home, and ready to do whatever job we tell them to do. But they’ll need to know where they are within the house. Dead reckoning with accelerometers and gyroscopes are just a sufficient solution; what we really need is an indoor location service. For his Hackaday Prize entry, [Göran] is doing just that. He’s building a small device that will find its position with 10 cm precision, indoors.
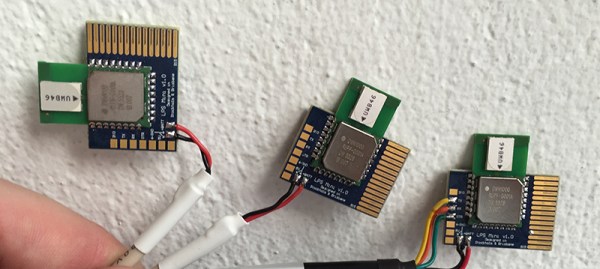
[Göran]’s LPS Mini is built around a very interesting part – the Decawave DWM100. It’s a module that uses an 802.15 radio to trilaterate the distance from several ‘anchors’ to a tag. This, by itself, gives the LPS Mini a navigation system with 10 cm precision. Even higher precision can be accomplished with an IMU gathering accelerometer, gyro, and compass data, and even further with a tiny altimeter. The result is a tiny board that knows exactly where it is.
As far as practical uses go, these LPS Mini boards were used to move beds around an art exhibit at Hayward Gallery in London. While moving beds around an art gallery doesn’t sound like a game-changing invention, think about the uses for GPS in the 1980s – no one could have imagined a chip that would tell you where you are or that could keep a quadcopter on the right heading.
You can check out [Göran]’s video for the LPS Mini below.
GPS-based location services will be around with us forever. If you’re in the outback, in the middle of the ocean, or even just in a neighborhood that doesn’t have good cell coverage, there’s no better way to figure out where you are than GPS. Using satellites orbiting thousands of miles above the Earth as a location service is an idea that breaks down at some very inopportune times. If you’re in a parking garage, you’re not using GPS to find your car. If you’re in a shopping mall, the best way to find your way to a store is still a map. Anyone every tried to use GPS and Google Maps in the hotel/casino labyrinth that is the Las Vegas strip?
[Blecky]’s entry for the Best Product competition of the Hackaday Prize aims to solve this problem. It’s an indoor location service using only cheap WiFi modules called SubPos. With just a few ESP8266 modules, [Blecky] can set up a WiFi positioning system, accurate to half a meter, that can be used wherever GPS isn’t.
The idea for a GPS-less positioning system came to [Blecky] after a caving expedition and finding navigation though subterranean structures was difficult without the aid of cell coverage and GPS. This got [Blecky] thinking what would be required to build a positioning service in a subterranian environment.
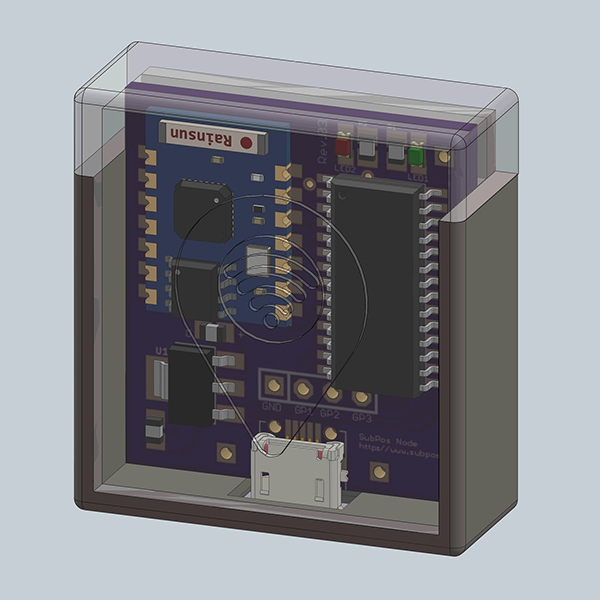
A SubPos node, equipped with an ESP8266 WiFi module
The answer to this question came in the form of a cheap WiFi module. Each of the SubPos nodes are encoded with the GPS coordinates of where they’re placed. By transmitting this location through the WiFi Beacon Frame, along with the transmitted power, any cell phone can use three or more nodes to determine its true location, down to a few centimeters. All of this is done without connecting to a specific WiFi network; it’s a complete hack of the WiFi standard to allow positioning data.
The most shallow comparison to an existing geolocation system would be a WiFi positioning system (WPS), but there are several key differences. In WPS, the WiFi APs don’t transmit their own location; the AP is simply cross-referenced with GPS coordinates in a database. Secondly, APs do not transmit their own transmit power – important if you’re using RSSI to determine how far you are from an Access Point.
The best comparison to an indoor location service comes from a new Decawave module that sets up ‘base stations’ and figures out a sensor’s location based on time of flight. This, however, requires additional radios for each device receiving location data. SubPos only requires WiFi, and you don’t even need to connect to an AP to get this location data; everything is broadcast as a beacon frame, and every device with WiFi detects a SubPos node automatically.
As an entry to the Hackaday Prize Best Product competition, there is an inevitable consideration as to how this product will be marketed. The applications for businesses are obvious; shopping malls could easily build a smartphone app showing a user exactly where in the mall they are, and provide directions to The Gap or one of the dozens of GameStops in the building. Because the SubPos nodes also work in 3D space, parking garage owners could set up a dozen or so SubPos nodes to direct you to your exact parking spot. Disney, I’m sure, would pay through the nose to get this technology in their parks.
Already [Blecky] is in talks with one company that would like to license his technology, but he’s not focused only on the high-dollar business accounts. He already has a product that needs manufacturing, and if he wins the Best Product competition, he will be working on something for the hacker/homebrew market. The price point [Blecky] sees is around $15 a node. The economics of this work with the ESP WiFi module, but [Blecky] is also looking at alternative chip sets that would allow for more than just RSSI position finding; an improved version of the SubPos node not based on the ESP-8266 could bring time of flight into the mix, providing better position accuracy while still being cheaper to manufacture than the current ESP-based solution.
[Blecky] has a great project on his hands here, and something we will, undoubtedly, see more of in the future. The idea of using WiFi beacon frames to transmit location data, and received signal strength to suss out a position is groundbreaking and applicable to everything from spelunking to finding your car in a parking garage. Since the SubPos system isn’t tied to any specific hardware, this could even be implemented in commercial routers, giving any device with WiFi true location data, inside or out. It’s also one of the top ten finalists for the Hackaday Prize Best Product competition, and like the others, it’s the cream of the crop.