If you’ve been even casually following NASA’s return to the Moon, you’re likely aware of the recent Wet Dress Rehearsal (WDR) for the Artemis II mission. You probably also heard that things didn’t go quite to plan: although the test was ultimately completed and the towering Space Launch System (SLS) rocket was fully loaded with propellant, a persistent liquid hydrogen leak and a few other incidental issues lead the space agency to delay further testing for at least a month while engineers make adjustments to the vehicle.
This constitutes a minor disappointment for fans of spaceflight, but when you’re strapping four astronauts onto more than five million pounds of propellants, there’s no such thing as being too cautious. In fact, there’s a school of thought that says if a WDR doesn’t shake loose some gremlins, you probably weren’t trying hard enough. Simulations and estimates only get you so far, the real thing is always more complex, and there’s bound to be something you didn’t account for ahead of time.
Although at its face the results seem obvious, a recent study by [Sandrah Eckel] et al. on the impact of electric cars in California is interesting from a quantitative perspective. What percentage of ICE-only cars do you need to replace with either full electric or hybrid cars before you start seeing an improvement in air quality?
A key part of the study was the use of the TROPOMI instrument, part of the European Sentinel-5 Precursor satellite. This can measure trace gases and aerosols in the atmosphere, both of which directly correlate with air quality. The researchers used historical TROPOMI data from 2019 to 2023 in the study, combining this data with vehicle registrations in California and accounting for confounding factors, such as a certain pandemic grinding things to a halt in 2020 and massively improving air quality.
Although establishing direct causality is hard using only this observational data, the researchers did show that the addition of 200 electric vehicles would seem to be correlated to an approximate 1.1% drop in measured atmospheric NO2. This nitrogen oxide is poisonous and fatal if inhaled in large quantities. It’s also one of the pollutants that result from combustion, when at high temperatures nitrogen from the air combines with oxygen molecules. Continue reading “Correlating Electric Cars With Better Air Quality”→
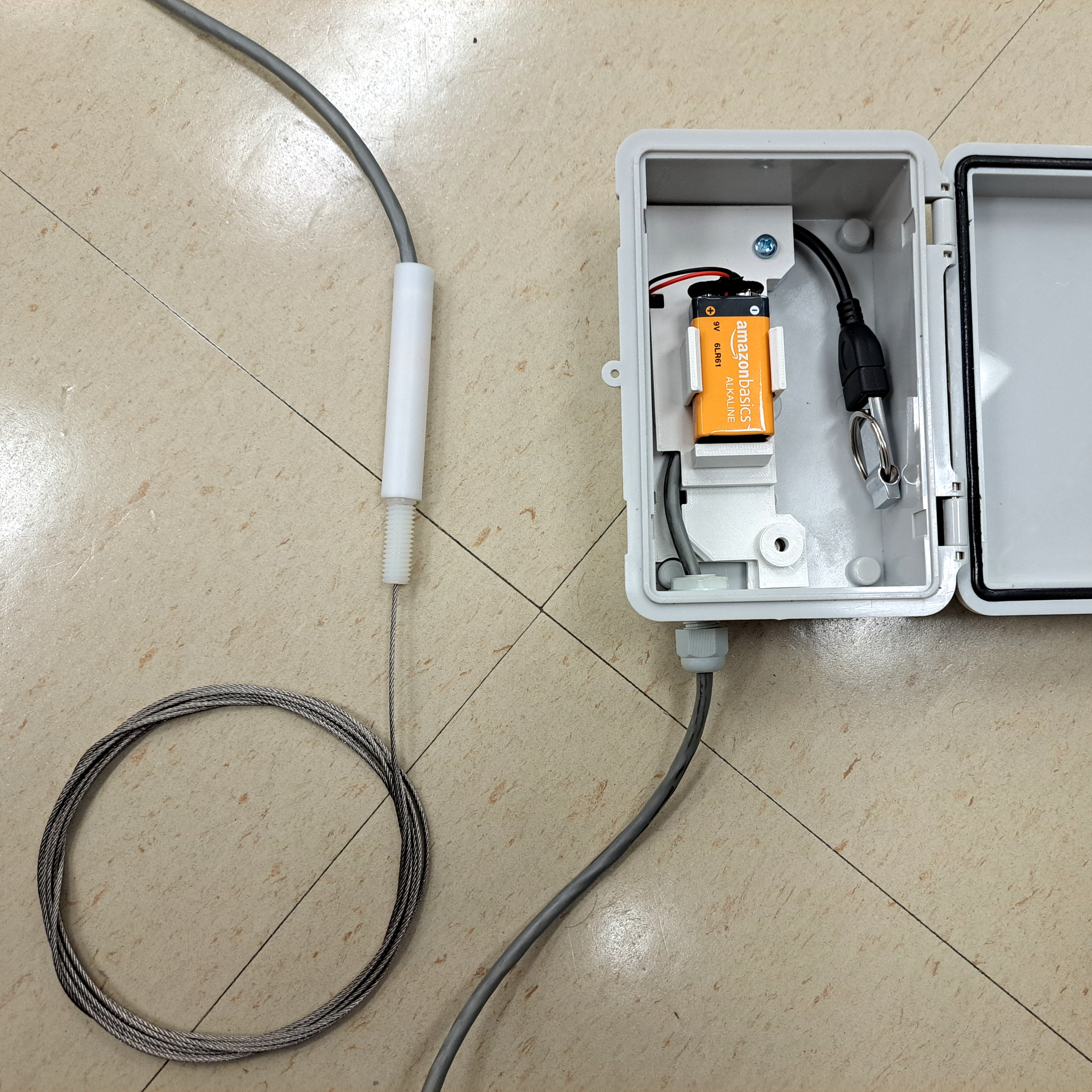
Water wells are simple things, but that doesn’t mean they are maintenance-free. It can be important to monitor water levels in a well, and that gets complicated when the well is remote. Commercial solutions exist, of course, but tend to be expensive and even impractical in some cases. That’s where [Hans Gaensbauer]’s low-cost, buoyancy-based well monitor comes in. An Engineers Without Border project, it not only cleverly measures water level in a simple way — logging to a text file on a USB stick in the process — but it’s so low-power that a single battery can run it for years.
The steel cable (bottom left) is attached to a submerged length of pipe, and inside the cylinder is a custom load cell. The lower the water level, the higher the apparent weight of the submerged pipe.
The monitor [Hans] designed works in the following way: suspend a length of pipe inside the well, and attach that pipe to a load cell. The apparent weight of the pipe will be directly proportional to how much of the pipe is above water. The fuller the well, the less the pipe will seem to weigh. It’s very clever, requires nothing to be in the well that isn’t already water-safe, and was designed so that the electronics sit outside in a weatherproof enclosure. Cost comes out to about $25 each, which compares pretty favorably to the $1000+ range of industrial sensors.
The concept is clever, but it took more that that to create a workable solution. For one thing, space was an issue. The entire well cap was only six inches in diameter, most of which was already occupied. [Hans] figured he had only about an inch to work with, but he made it work by designing a custom load cell out of a piece of aluminum with four strain gauges bonded to it. The resulting sensor is narrow, and sits within a nylon and PTFE tube that mounts vertically to the top of the well cap. Out from the bottom comes a steel cable that attaches to the submerged tube, and out the top comes a cable that brings the signals to the rest of the electronics in a separate enclosure. More details on the well monitor are in the project’s GitHub repository.
All one has to do after it’s installed is swap out the USB stick to retrieve readings, and every once in a long while change the battery. It sure beats taking manual sensor readings constantly, like meteorologists did back in WWII.
Control panels of a pre-digitalization nuclear plant look quite daunting, with countless dials, buttons and switches that all make perfect sense to a trained operator, but seem as random as those of the original Enterprise bridge in Star Trek to the average person. This makes the reconstruction of part of the RBMK reactor control by the [Chornobyl Family] on YouTube a fun way to get comfortable with one of the most important elements of this type of reactor’s controls.
The section that is built here pertains to the control rods of the RBMK’s reactor, its automatic regulations and emergency systems like AZ-5 and BAZ. The goal is not just to have a shiny display piece that you can put on the wall, but to make it function just like the real control panel, and to use it for demonstrations of the underlying control systems. The creators spent a lot of time talking with operators of the Chornobyl Nuclear Plant – which operated until the early 2000s – to make the experience as accurate as possible.
Although no real RBMK reactor is being controlled by the panel, its ESP32-powered logic make it work like the real deal, and even uses a dot-matrix printer to provide logging of commands. Not only is this a pretty cool simulator, it’s also just the first element of what will be a larger recreation of an RBMK control room, with more videos in this series to follow.
Also covered in this video are the changes made after the Chernobyl Nuclear Plant’s #4 accident, which served to make RBMKs significantly safer, albeit at the cost of more complexity on the control panel.
The best place to start is at the beginning, so the video demonstrates a simple cube wireframe drawn by connecting eight points together with lines. This is simple enough, but modern 3D graphics are really triangles stitched together to make essentially every shape we see on the screen. For [NCOT Technology]’s software, he’s using the Utah Teapot, essentially the “hello world” of 3D graphics programming. The first step is drawing all of the triangles to make the teapot wireframe. Then the triangles are made opaque, which is a step in the right direction but isn’t quite complete. The next steps to make it look more like a teapot are to hide the back faces of the triangles, figure out which of them face the viewer at any given moment, and then make sure that all of these triangles are drawn in the correct orientation.
Rendering a teapot is one thing, but to get to something more modern-looking like a first-person shooter, he also demonstrates all the matrix math that allows the player to move around an object. Technically, the object moves around the viewer, but the end effect is one that eventually makes it so we can play our favorite games, from DOOM to DOOM Eternal. He notes that his code isn’t perfect, but he did it from the ground up and didn’t use anything to build it other than his computer and his own brain, and now understands 3D graphics on a much deeper level than simply using an engine or API would generally allow for. The 3D world can also be explored through the magic of Excel.
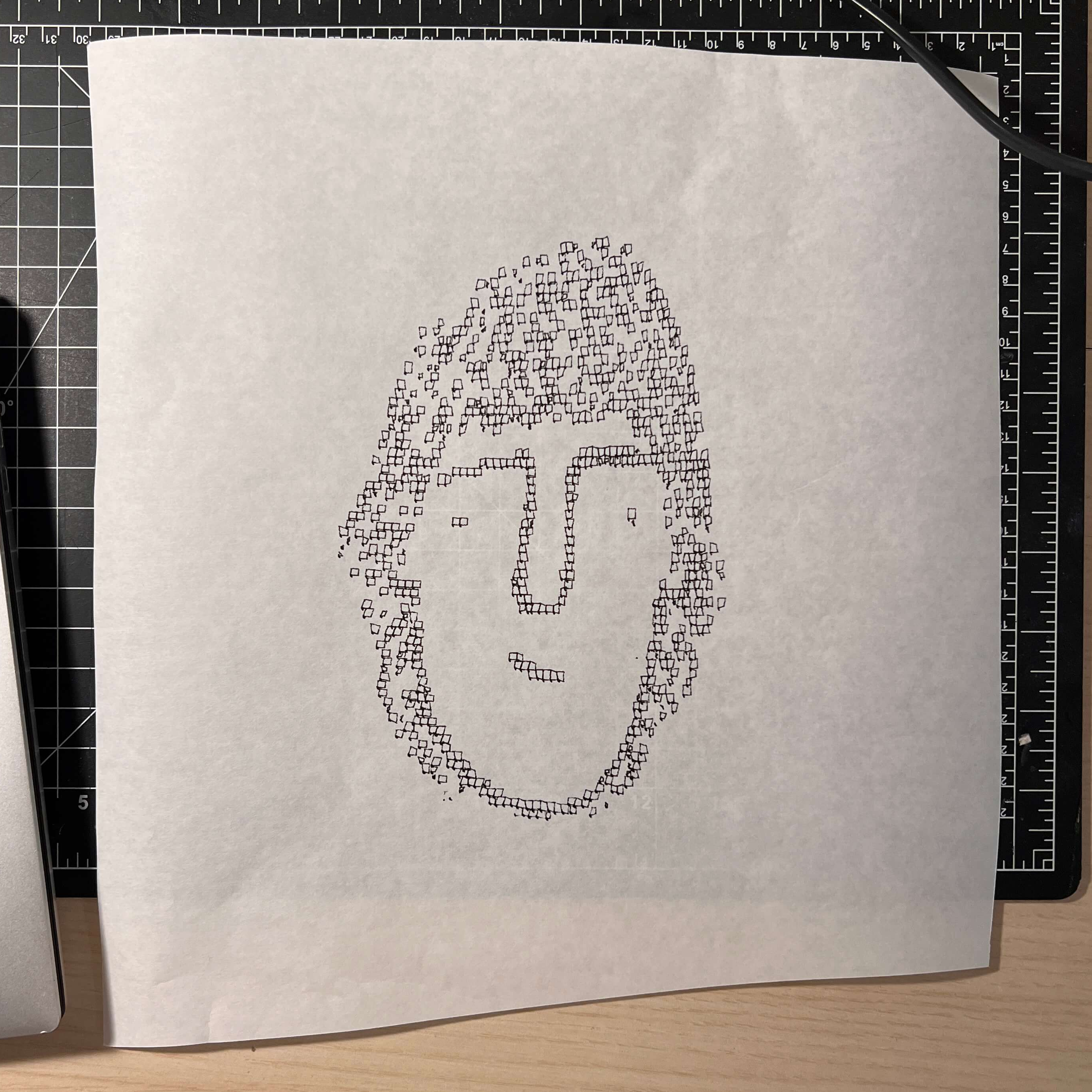
[Teddy Warner]’s GPenT (Generative Pen-trained Transformer) project is a wall-mounted polargraph that makes plotter art, but there’s a whole lot more going on than one might think. This project was partly born from [Teddy]’s ideas about how to use aspects of machine learning in ways that were really never intended. What resulted is a wall-mounted pen plotter that offers a load of different ‘generators’ — ways to create line art — that range from procedural patterns, to image uploads, to the titular machine learning shenanigans.
There are loads of different ways to represent images with lines, and this project helps explore them.
Want to see the capabilities for yourself? There’s a publicly accessible version of the plotter interface that lets one play with the different generators. The public instance is not connected to a physical plotter, but one can still generate and preview plots, and download the resulting SVG file or G-code.
Most of the generators do not involve machine learning, but the unusual generative angle is well-represented by two of them: dcode and GPenT.
dcode is a diffusion model that, instead of converting a text prompt into an image, has been trained to convert text directly into G-code. It’s very much a square peg in a round hole. Visually it’s perhaps not the most exciting, but as a concept it’s fascinating.
The titular GPenT works like this: give it a scrap of text inspiration (a seed, if you will), and that becomes a combination of other generators and parameters, machine-selected and stacked with one another to produce a final composition. The results are unique, to say the least.
Once the generators make something, the framed and wall-mounted plotter turns it into physical lines on paper. Watch the system’s first plot happen in the video, embedded below under the page break.
This is a monster of a project representing a custom CNC pen plotter, a frame to hold it, and the whole software pipeline both for the CNC machine as well as generating what it plots. Of course, the journey involved a few false starts and dead ends, but they’re all pretty interesting. The plotter’s GitHub repository combined with [Teddy]’s write up has all the details one may need.
It’s also one of those years-in-the-making projects that ultimately got finished and, we think, doing so led to a bit of a sigh of relief on [Teddy]’s part. Most of us have unfinished projects, and if you have one that’s being a bit of a drag, we’d like to remind you that you don’t necessarily have to finish-finish a project to get it off your plate. We have some solid advice on how to (productively) let go.
Making sure the heatgun is on ‘low’ and gloves are on while pushing on the mold. (Credit: Zion Brock)
Although hobbyists these days most often seem to use thermoplastics as a print-and-done material in FDM printers, there’s absolutely nothing stopping you from taking things further with thermoforming. Much like forming acrylic using a hot wire or hot air, thermoplastics like PLA can be further tweaked with a similar method. This can be much less complex than 3D printing the design with supports, as demonstrated by [Zion Brock].
For this classically styled radio project the front grille was previously 3D printed with the curved shape, but to avoid an ugly edge it had to be printed with most of the grille off the print bed, requiring countless supports and hours of printing time. To get around this, [Zion] opted to print the grille flat and then thermoform its curved shape. Of course, due to the unusual shape of the grille, this required a bit more effort than e.g. a spherical form.
This is similar to what is used with sheet metal to get detailed shaped, also requiring a mold and a way to stretch the flat shape over the mold. With the flat form designed to have all the material in the right places, it was able to be printed in less than an hour in PLA and then formed with a heatgun aimed at the part while the two-section mold is slid together to create the final form.
You can find the design files and full instructions on the website for the radio project.