
For some reason, people are really into tiny arcade machines that basically require you to ruin your hands and eyes in order to play on them. That said, unlike the fifty gazillion ‘retro consoles’ that you can buy everywhere, the particular mini arcade machine that [David Given] of [Poking Technology] obtained from AliExpress for a teardown and ROM dump seems to have custom games rather than the typical gaggle of NES games and fifty ROM hack variations of each.
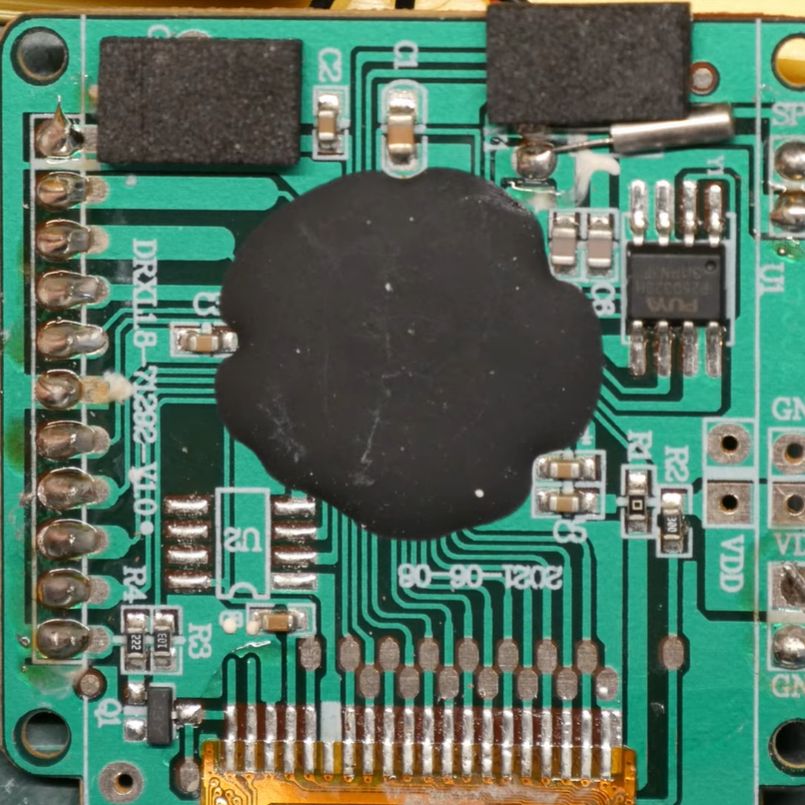
After a bit of gameplay to demonstrate the various games on the very tiny machine with tiny controls and a tiny 1.8″, 160×128 ST7735 LC display, the device was disassembled. Inside is a fairly decent speaker, the IO board for the controls, and the mainboard with an epoxy blob-covered chip and the SPI EEPROM containing the software. Dumping this XOR ‘encrypted’ ROM was straightforward, revealing it to be a 4 MB, W23X32-compatible EEPROM.
Continue reading “Reverse Engineering A ‘Tony’ 6502-based Mini Arcade Machine”















