
 After previously trying out low-tech compression molding with a toaster oven and 3D printed molds, [future things] is back with a video that seeks to explore some of the questions raised after the first video. Questions such as how well this method works with HDPE and PLA thermoplastics, whether the flashing could be cut off by the mold and the right temperatures and times to heat the plastic before a charge is ready for inserting into the mold.
After previously trying out low-tech compression molding with a toaster oven and 3D printed molds, [future things] is back with a video that seeks to explore some of the questions raised after the first video. Questions such as how well this method works with HDPE and PLA thermoplastics, whether the flashing could be cut off by the mold and the right temperatures and times to heat the plastic before a charge is ready for inserting into the mold.
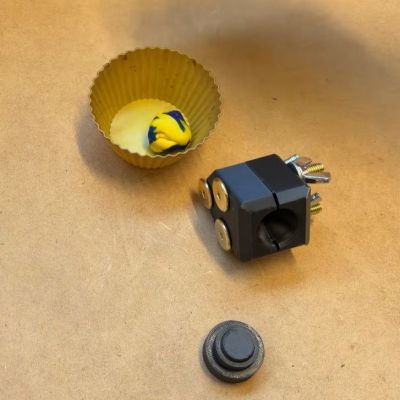
In this video the same PHA-based mold is used, but in a three-piece configuration to allow for a more complex shape. This way game tokens could be made for use by the son of the author, which also shows one straightforward and very practical use of this method.
A big change here is that no more metal chopsticks are used to handle the charge, as this was found to cool down the heated plastic too much. Instead the hot charge is handled with fingers and wooden chopsticks, with the plastic heated until it has about the consistency of thick honey. For LDPE this takes about 5-7 minutes at 130°C. After compressing the charge into the mold, about 30 seconds are all it takes for the plastic to cool down enough.
There was a question about the use of mold release spray, but this didn’t seem to cause any issues, so can probably be used safely. As for other plastic types, HDPE works fine too when you heat it up at a slightly higher temperature and don’t mind it being tougher to handle.
Easiest is probably PLA, which would seem unsurprising. Using some chopped-up PLA printing waste it was easy enough to make a few more game tokens, demonstrating that this method is very viable for converting scrap FDM print waste into such items. As noted in the comments by [edmundchao] this method works great too for PETG, using PETG molds, while using a ratcheting clamp for extra pressure instead of just pressing by hand.
Continue reading “Recycling PLA And Other Plastic Waste With Compression Molding”

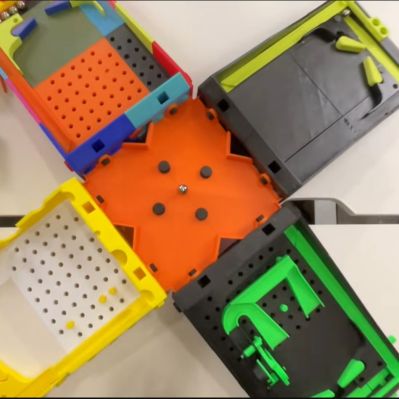 It seems fair to say that pinball machines are among the most universally loved gaming systems known today, yet the full-sized ones are both very expensive and very large, while even the good quality table-sized ones tend to be on the expensive side. That raises the question of whether a fully 3D printed pinball machine could at all be fun and not just feel like a cheapo toy? A recent video by [Steven] from [3D Printer Academy] on YouTube
It seems fair to say that pinball machines are among the most universally loved gaming systems known today, yet the full-sized ones are both very expensive and very large, while even the good quality table-sized ones tend to be on the expensive side. That raises the question of whether a fully 3D printed pinball machine could at all be fun and not just feel like a cheapo toy? A recent video by [Steven] from [3D Printer Academy] on YouTube 














