Throughout evolution, the concept of powered flight has evolved and refined itself multiple times across both dinosaurs (birds), mammals (bats) and insects. So why is it that our human-made flying machines are so unlike them? The field of nature-inspired flying drones is a lively one, but one that is filled with challenges. In a recent video on the Ziroth YouTube channel, [Ryan Inis] takes a look at these efforts, in particular those of EPFL, whose recent RAVEN drone we had a look at recently already.
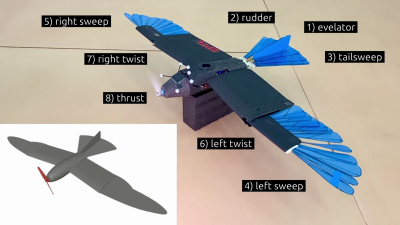
Along with RAVEN, there is also another project (LisRaptor) based on the Northern Goshawk, a bird of prey seen in both Europe and North-America. While RAVEN mostly focused on the near-vertical take-off that smaller birds are capable of, this project studies the interactions between the bird’s wings and tail, and how these enable rapid changes to the bird’s flight trajectory and velocity, while maintaining efficiency.
The video provides a good overview of this project. Where the LisRaptor differs from the animal is in having a rudder and a propeller, but the former should ideally not be necessary. Obviously the kinematics behind controlled flight are not at all easy, and the researchers spent a lot of time running through configurations aided by machine learning to achieve the ideal – and most efficient – wing and tail configuration. As these prototypes progress, they may one day lead to drones that are hard to differentiate from birds and bats.