 At first glance, it looks eerily similar to Inspector Gadget’s Propeller Cap, except it’s a backpack. [Samm Sheperd] built a Propeller Backpack (video, embedded after the break) which started off as a fun project but almost ended up setting him on fire.
At first glance, it looks eerily similar to Inspector Gadget’s Propeller Cap, except it’s a backpack. [Samm Sheperd] built a Propeller Backpack (video, embedded after the break) which started off as a fun project but almost ended up setting him on fire.
Finding himself snowed in during a spell of cold weather, he found enough spare RC and ‘copter parts to put his crazy idea in action. He built a wooden frame, fixed the big Rimfire 50CC outrunner motor and prop to it, slapped on a battery pack and ESC, and zip-tied it all on to the carcass of an old backpack.
Remote control in hand, and donning a pair of Ski’s, he did a few successful trial runs. It looks pretty exciting watching him zip by in the snowy wilderness. Well, winter passed by, and he soon found himself in sunny California. The Ski’s gave way to a bike, and a local airfield served as a test track. He even manages to put in some exciting runs on the beach. But the 10S 4000 mAH batteries seem to be a tad underpowered to his liking, and the motor could do with a larger propeller. He managed to source a 12S 10,000 mAH battery pack, but that promptly blew out his Aerostar ESC during the very first static trial.
He then decided to rebuild it from ground up. A ten week welding course that he took to gain some college credits proved quite handy. He built a new TiG welded Aluminium frame which was stronger and more lightweight than the earlier wooden one. He even thoughtfully added a propeller safety guard after some of his followers got worried, although it doesn’t look very effective to us. A bigger propeller was added and the old burnt out ESC was replaced with a new one. It was time for another static trial before heading out in to the wide open snow again. And that’s when things immediately went south. [Samm] was completely unaware as the new ESC gloriously burst in to flames (8:00 into the third video), and it took a while for him to realize why his video recording friend was screaming at him. Check out the three part video series after the break to follow the story of this hack. For a bonus, check out the 90 year old gent who stops by for a chat on planes and flying (8:25 in the third video).
 But [Samm] isn’t letting this setback pin him down. He’s promised to take this to a logical finish and build a reliable, functional Propeller Backpack some time soon. This isn’t his first rodeo building oddball hacks. Check out his experiment on Flying Planes With Squirrel Cages.
But [Samm] isn’t letting this setback pin him down. He’s promised to take this to a logical finish and build a reliable, functional Propeller Backpack some time soon. This isn’t his first rodeo building oddball hacks. Check out his experiment on Flying Planes With Squirrel Cages.
We seem to be catching a wave of wind-powered transportation hacks these days. Hackaday’s own [James Hobson] spent time in December on a similar, arguably safer, concept. He attached ducted fans to the back of a snowboard. We like this choice since flailing limbs won’t get caught in these types of fans.
Continue reading “Propeller Backpack For Lazy Skiers” →

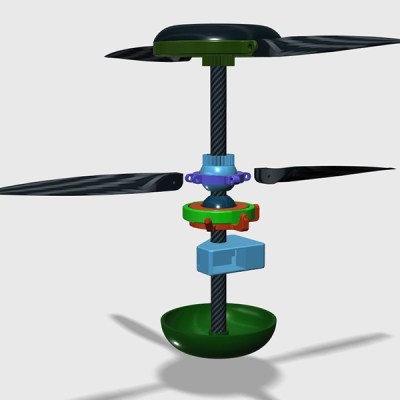 His focus is on designing small and very portable drones, preferably one that has folding arms and can fit into a backpack. His portfolio even includes a clone of the DJI Mavic, the gimbaled camera-carrying consumer drone known for its small volume when folded.
His focus is on designing small and very portable drones, preferably one that has folding arms and can fit into a backpack. His portfolio even includes a clone of the DJI Mavic, the gimbaled camera-carrying consumer drone known for its small volume when folded.


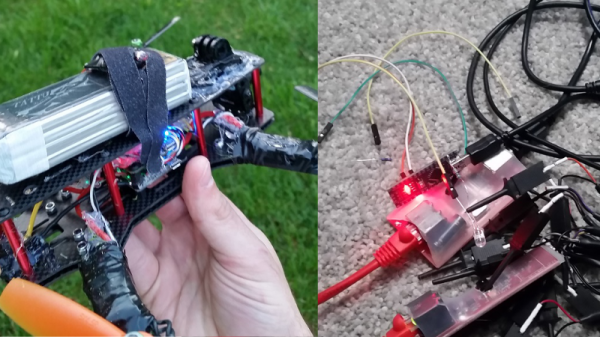




 ask yourself while picking up the pieces of you shiny new quad off the ground… “they made these things out of flexible material?”
ask yourself while picking up the pieces of you shiny new quad off the ground… “they made these things out of flexible material?”








