Purposely choosing obsoleted technology combines all the joy of simpler times with the comfort of knowing you’re not actually stuck with outdated (and oftentimes inferior) technology. The rotary phone is a great example here, and while rarely anyone would want to go back to the lenghty, error-prone way of dialing a number on it on an everyday basis, it can definitely add a certain charm to a project. [Caroline Buttet] thought so as well, and turned her grandma’s old rotary phone into a time-traveling, globe-trotting web radio.
The main idea is fairly simple: a Raspberry Pi connects via browser to a web radio site that plays music throughout the decades from places all over the world. [Caroline]’s implementation has a few nice twists added though. First of all, the phone of course, which doesn’t only house the Raspberry Pi, but serves both as actual listening device via handset speaker, and as input device to select the decade with the rotary dial. For a headless setup, she wrote a Chromium extension that maps key events to virtual clicks on the corresponding DOM element of the web site — like the ones that change the decade — and a Python script that turns the rotary dial pulses into those key events.
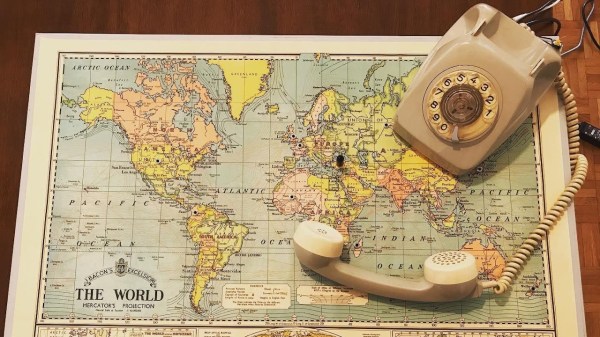
However, the phone is only half the story here, and the country selection is just as fascinating — which involves an actual world map. An audio connector is attached to each selectable country and connected to an Arduino. If the matching jack is plugged into it, the Arduino informs the Raspberry Pi via serial line about the new selection, and the same Chromium extension then triggers the country change in the underlying web site. You can check all the code in the project’s GitHub repository, and watch a demo and brief explanation in the videos after the break.
Sure, listening radio through a telephone may not be the most convenient way — unless it’s the appropriate genre — but that clearly wasn’t the goal here anyway. It’s definitely an interesting concept, and we could easily see it transferred to some travel- or spy-themed escape room setting. And speaking of spying, if [Caroline]’s name sounds familiar to you, you may remember her virtual peephole from a few months back.
Continue reading “Rotary Phone Takes You Around The World And Through Time – With Music” →