China played host to what, presumably, was the world’s first robot and human half-marathon. You can check out the action and the Tiangong Ultra robot that won in the video below. The event took place in Beijing and spanned 21.1 km. There was, however, a barrier between lanes for humans and machines.
The human rules were the same as you’d expect, but the robots did need a few concessions, such as battery swap stops. The winning ‘bot crossed the finish line in just over 160 minutes. However, there were awards for endurance, gait design, and design innovation.
How far can you stretch a measuring tape before it buckles? The answer probably depends more on the tape than the user, but it does show how sturdy the coiled spring steel rulers can be. [Gengzhi He et. al.] may have been playing that game in the lab at UC San Diego when they hit upon the idea for a new kind of low-cost robotic gripper.
Four motors, four strips of measuring tape (doubled up)– one robot hand.
With the lovely backronym “GRIP-tape” — standing for Grasping and Rolling in Plane — you get a sense for what this effector can do. Its two “fingers” are each made of loops of doubled-up measuring tape bound together with what looks suspiciously like duck tape. With four motors total, the fingers can be lengthened or shortened by spooling the tape, allowing a reaching motion, pivot closer or further apart for grasping, and move-in-place like conveyor belts, rotating the object in their grasp.
The combination means it can reach out, grab a light bulb, and screw it into a socket. Or open and decant a jar of spices. Another video shows the gripper reaching out to pick a lemon, and gently twist it off the tree. It’s quite a performance for a device with such modest components.
At the moment, the gripper is controlled via remote; the researchers plan on adding sensors and AI autonomous control. Read all the details in the preprint, or check below the fold to watch the robot in action.
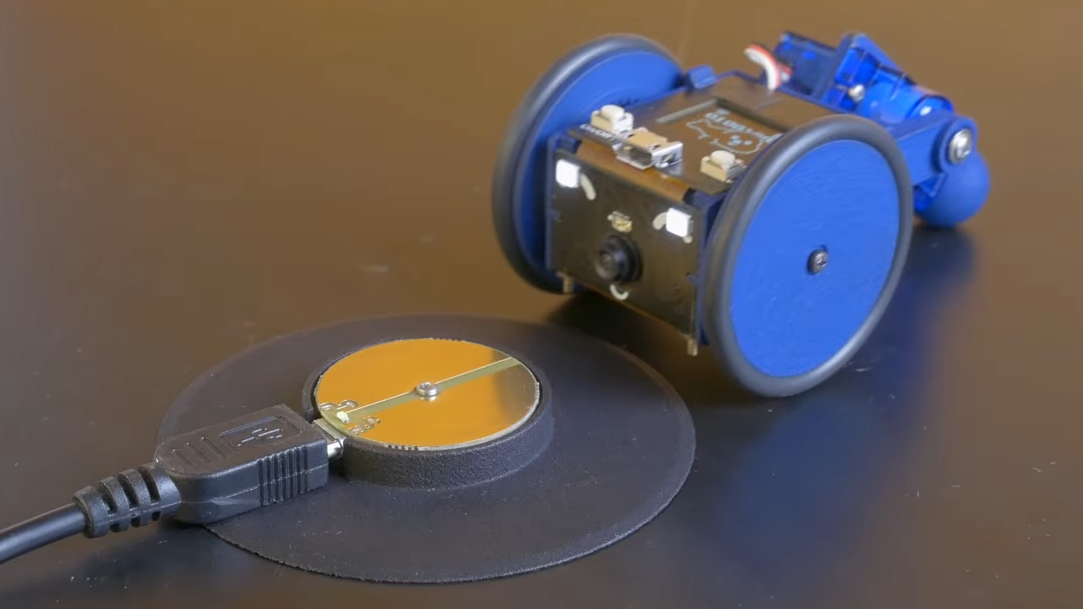
[Charmed Labs] are responsible for bringing numerous open-source hardware products to fruition over the years, and their latest device is an adorably small robotic camera platform called Goby, currently crowdfunding for its initial release. Goby has a few really clever design features and delivers a capable (and hackable) platform for under 100 USD.
Goby embraces its small size, delivering what its creators dub “tinypresence” — or the feeling of being there, but on a very small scale. Cardboard courses, LEGO arenas, or even tabletop gaming scenery hits different when experienced from a first-person perspective. Goby is entirely reprogrammable with nothing more than a USB cable and the Arduino IDE, while costing less than most Arduino starter kits.
Recharging happens by driving over the charger, then pivoting down so the connectors (the little blunt vampire fangs under and to each side of the camera) come into contact with the charger.
One of the physical features we really like is the tail-like articulated caster at the rear. Flexing this pivots Goby up or down (and can even flip Goby completely over), allowing one to pan and tilt the view without needing to mount the camera on a gimbal. It also comes into play for recharging; Goby simply moves over the disc-shaped charger and pivots down to make contact.
At Goby‘s heart is an ESP32-S3 and OmniVision OV2640 camera sensor streaming a live video feed (and driving controls) with WebRTC. Fitting the WebRTC stack onto an ESP32 wasn’t easy, but opens up possibilities beyond just media streaming.
Goby is set up to make launching an encrypted connection as easy as sharing a URL or scanning a QR code. The link is negotiated between bot and client with the initial help of an external server, and once a peer-to-peer connection is established, the server’s job is done and it is out of the picture. [Charmed Labs]’s code for this functionality — named BitBang — is in beta and destined for an open release as well. While BitBang is being used here to make it effortless to access Goby remotely, it’s more broadly intended to make web access for any ESP32-based device easier to implement.
As far as tiny remote camera platforms go, it might not be as small as rebuilding a Hot Wheels car into a micro RC platform, but it’s definitely more accessible and probably cheaper, to boot. Check it out at the Kickstarter (see the first link in this post) and watch it in action in the video, embedded just below the page break.
Running a dairy farm used to be a rather hands-on experience, with the farmer required to be around every few hours to milk the cows, feed them, do all the veterinarian tasks that the farmer can do themselves, and so on. The introduction of milking machines in the early 20th century however began a trend of increased automation whereby a single farmer could handle a hundred cows by the end of the century instead of only a couple. In a recent article in IEEE Spectrum covers the continued progress here is covered, including cows milking themselves, on-demand style as shown in the top image.
The article focuses primarily on Dutch company Lely’s recent robots, which range from said self-milking robots to a manure cleaning robot that looks like an oversized Roomba. With how labor-intensive (and low-margin) a dairy farm is, any level of automation that can improve matters will be welcomed, with so far Lely’s robots receiving a mostly positive response. Since cows are pretty smart, they will happily guide themselves to a self-milking robot when they feel that their udders are full enough, which can save the farmer a few hours of work each day, as this robot handles every task, including the cleaning of the udders prior to milking and sanitizing itself prior to inviting the next cow into its loving embrace.
As for the other tasks, speaking as a genuine Dutch dairy farm girl who was born & raised around cattle (and sheep), the idea of e.g. mucking out stables being taken over by robots is something that raises a lot more skepticism. After all, a farmer’s children have to earn their pocket money somehow, which includes mucking, herding, farm maintenance and so on. Unless those robots get really cheap and low maintenance, the idea of fully automated dairy farms may still be a long while off, but reducing the workload and making cows happier are definitely lofty goals.
Top image: The milking robot that can automatically milk a cow without human assistance. (Credit: Lely)
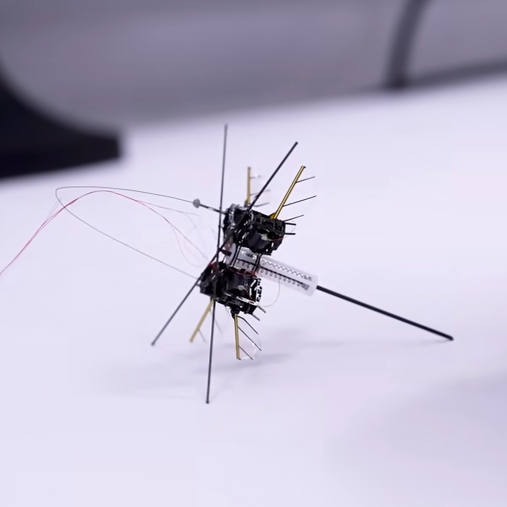
Most robots depend on controlled environments, because the real world is hard to get around in. The smaller the robot, the bigger this problem because little wheels (or legs) can take only little steps. One way around that is MIT’s latest one-legged hopping robot, which sports a set of four insect-like wings on its top end and can quickly pogo-hop its way across different terrain with ease.
The four wings provide lift, and steer the robot so that its single leg lands precisely.
The wings aren’t for flying in the usual sense. They provide lift, but also help the tiny device steer itself so that its hops land precisely. Earlier incarnations of one-legged hopping robots (like this one) accomplished this with propellers and electric motors, but traditional motors are a non-starter on a device that weighs less than a paperclip.
Right now, this little winged hopper is not completely self-contained (power and control systems are off-board) but running it as a tethered unit allows researchers to test and evaluate different, minimalistic ways for a machine to move around efficiently. And efficiency is the whole goal of going in this direction.
Certainly tiny flying drones already exist and get about in the real world just fine. But if one wants to shed mass, ditch conventional motors, and reduce cost and power consumption, this tiny winged hopping machine is one way to do it. And it can even carry payloads! The payloads are tiny, of course, but being able to haul around ten times one’s own weight and still function reliably is an impressive feat.
You can watch it in action in the video embedded just below the page break. Once you’ve watched that, we’d like to remind you that novel locomotion isn’t just the domain of hopping robots. Tiny robots with explosive joints is just as wild as it sounds.
The bi-arm ALOHA robot equipped with Gemini 2.0 software can take general instructions and then respond dynamically to its environment as it carries out its tasks. This family of robots aims to be highly dexterous, interactive, and general-purpose by applying the sort of non-task-specific training methods that have worked so well with LLMs, and applying them to robot tasks.
There are two things we here at Hackaday are wondering. Is there anything a robot will never do? And just how cherry-picked are these examples in the slick video? Let us know what you think in the comments!
Underwater robots face many challenges, not least of which is how to move around. ZodiAq is a prototype underwater soft robot (link is to research paper) that takes an unusual approach to this problem: multiple flexible appendages. The result is a pretty unconventional-looking device that can not only get around effectively, but can do so without disturbing marine life.
ZodiAq sports a soft flexible appendage from each of its twelve faces, but they aren’t articulated like you might think. Despite this, the device can crawl and swim.
With movement inspired by bacterial flagella, ZodiAq moves in an unusual but highly controllable way.
Each soft appendage is connected to a motor, which rotates the attached appendage. This low-frequency but high-torque rotation, combined with the fact that each appendage has a 45° bend to it, has each acting as a rotor. Rotation of the appendages acts on the surrounding fluid, generating thrust. When used together in the right way, these appendages allow the unit to move in a perfectly controllable manner.
This locomotion method is directly inspired by the swimming gait of bacterial flagella, which the paper mentions are regarded as the only example of a biological “wheel”.
How fast can it go? The prototype covers a distance of two body lengths every fifteen seconds. True, it’s no speed demon compared to a propeller, but it doesn’t disturb marine life or environments as it moves around. This method of movement has a lot going for it. It’s adaptable and doesn’t use all twelve appendages at once; so there’s redundancy built in. If some get damaged or go missing, it can still move, just slower.
ZodiAq‘s design strikes us as a very accessible concept, should any aspiring marine robot hackers wish to give it a shot. We’ve seen other highly innovative and beautiful underwater designs as well, like body-length undulating fins and articulated soft arms.
We do notice that since it lacks a “front” — it might be a challenge to decide how to mount something like a camera. If you have any ideas, share them in the comments.