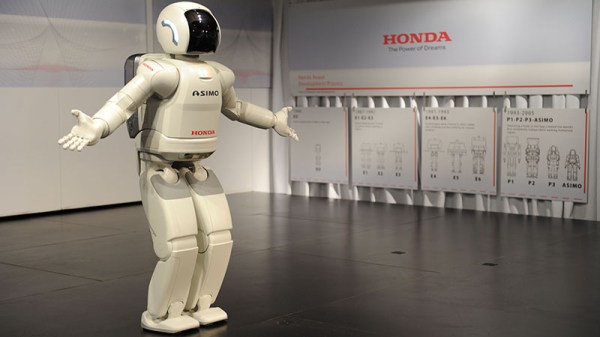
Fans of technology will recall a number of years when Honda’s humanoid robot Asimo seemed to be everywhere. In addition to its day job in a research lab, Asimo had a public relations side gig showing everyone that Honda is about more than cars and motorcycles. From trade shows to television programs, even amusement parks and concert halls, Asimo worked a busy publicity schedule. Now a retirement party may be in order, since the research project has reportedly been halted.
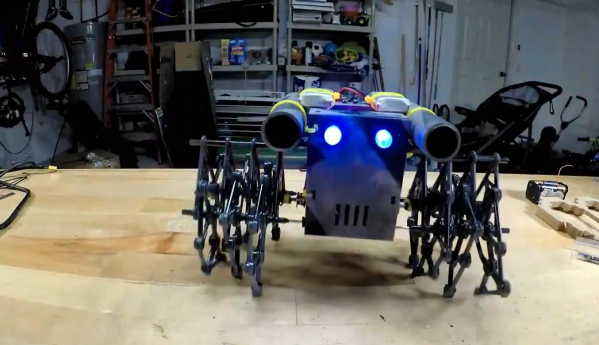
Asimo’s activity has tapered off in recent years so this is not a huge surprise. Honda’s official Asimo site itself hasn’t been updated in over a year. Recent humanoid robots in media are more likely to be in context of events like DARPA Robotics Challenge or from companies like Boston Dynamics. Plus the required technology has become accessible enough for us to build our own two-legged robots. So its torch has been passed on, but Asimo would be remembered as the robot who pioneered a lot of thinking into how humanoid robots would interact with flesh and blood humans. It was one of the first robots who could recognize human waving as a gesture, and wave back in return.
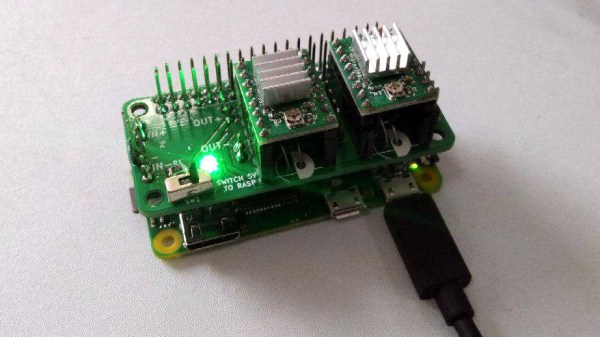
Many concepts developed from Asimo will live on as Honda’s research team shift focus to less humanoid form factors. We can see Honda’s new ambitions in their concept video released during CES 2018 (embedded below.) These robots are still designed to live and work alongside people, but now they are specialized to different domains and they travel on wheels. Which is actually a step closer to the Jetsons’ future, because Rosie rolls on wheels!
Continue reading “Wave Goodbye To Honda Asimo, A Robot That Would Wave Back”