Breakfast may be the most important meal of the day, but who wants to get up first thing in the morning and make it? Well, there may come a day when a robot can do the dirty work for you. This is Toyota Research Institute’s vision with their innovatively-trained breakfast bots.
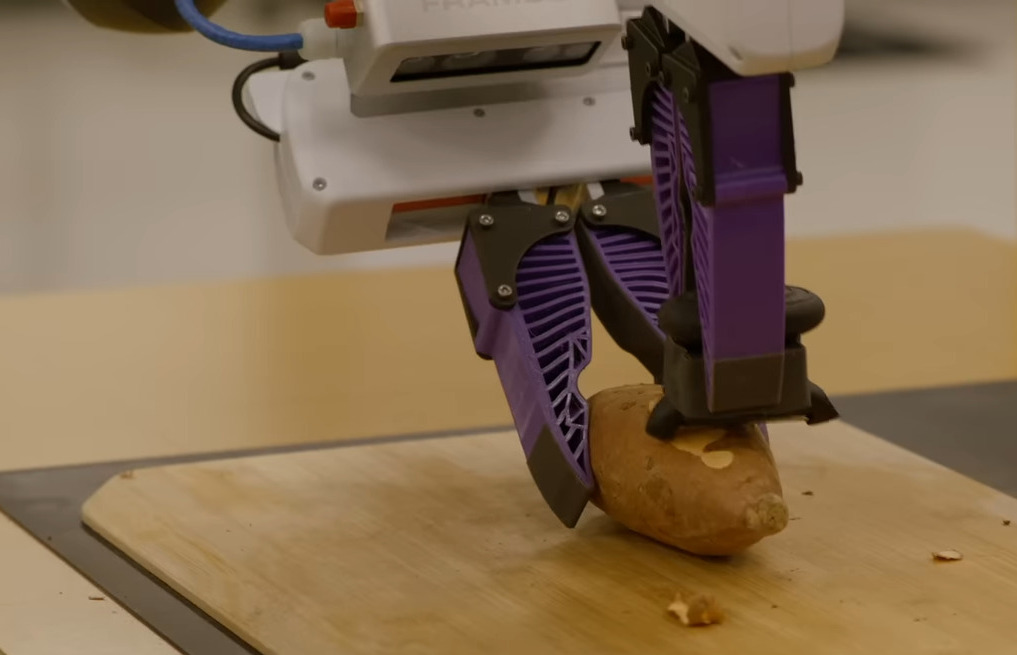 Going way beyond pick and place tasks, TRI has, so far, taught robots how to do more than 60 different things using a new method to teach dexterous skills like whisking eggs, peeling vegetables, and applying hazelnut spread to a substrate. Their method is built on generative AI technique called Diffusion Policy, which they use to create what they’re calling Large Behavior Models.
Going way beyond pick and place tasks, TRI has, so far, taught robots how to do more than 60 different things using a new method to teach dexterous skills like whisking eggs, peeling vegetables, and applying hazelnut spread to a substrate. Their method is built on generative AI technique called Diffusion Policy, which they use to create what they’re calling Large Behavior Models.
Instead of hours of coding and debugging, the robots learn differently. Essentially, the robot gets a large flexible balloon hand with which to feel objects, their weight, and their effect on other objects (like flipping a pancake). Then, a human shows them how to perform a task before the bot is let loose on an AI model. After a number of hours, say overnight, the bot has a new working behavior.
Now, since TRI claims that their aim is to build robots that amplify people and not replace them, you may still have to plate your own scrambled eggs and apply the syrup to that short stack yourself. But they plan to have over 1,000 skills in the bag of tricks by the end of 2024. If you want more information about the project and to learn about Diffusion Policy without reading the paper, check out this blog post.
Perhaps the robotic burger joint was ahead of its time, but we’re getting there. How about a robot barista?
Continue reading “Humans And Balloon Hands Help Bots Make Breakfast”