I was enchanted by a failed project this week. [Andrew Consroe]’s CNC scroll saw doesn’t work yet, but the emphasis is on the word “yet”. Heck, even when it does work, it might not make sense, but that’s not the point anyway.

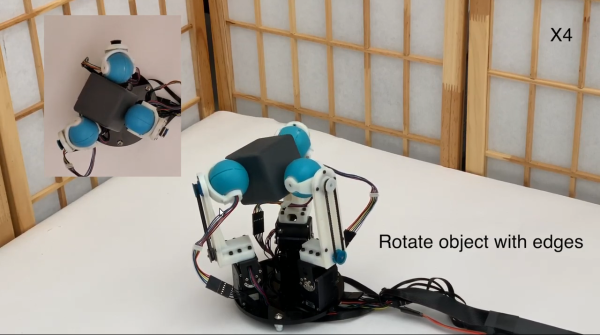
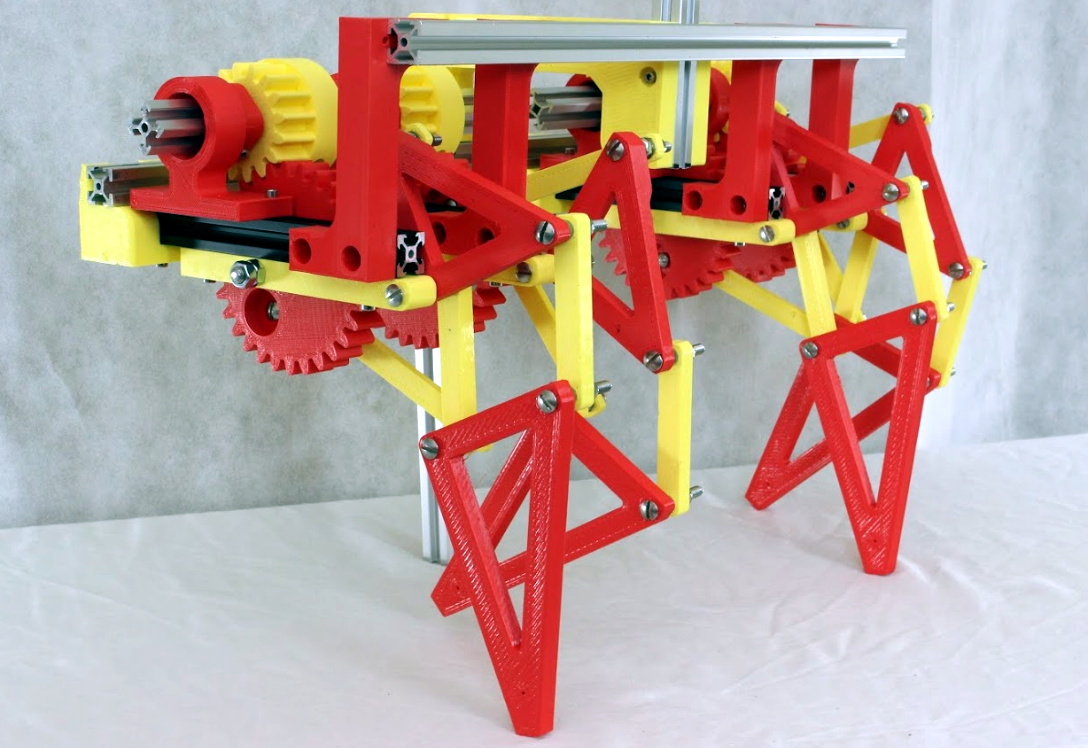
A scroll saw table has a vertical reciprocating blade perpendicular to a table, a lot like a band saw but with a shorter blade. You push the wood sheet to be cut into the blade, and because it’s thin, you can twist and turn all sorts of interesting jigsaw-puzzle shapes. [Andrew] automated this with an X-Y gantry and an innovative geared rotating ring, needed to keep the wood fed into the cutting edge of the blade.
It’s a crazy contraption, and a difficult and unique movement planning problem, and watching it move in the video is a joy. But it’s not working either: errors in the motion add up over a cut, and he’s ended up snapping a blade on every piece. And this is version three of the device!
But here comes the inspiration. First, the only reason he’s filming this is to keep a log of how the project looked at this phase — he’s already planning out the next one. Second, this is the soul of learning by doing. You don’t learn anything unless you’re trying something new.
And finally, [Andrew]’s project reminds me of why I love machine builds in the age of rapid prototyping. Blazing through three entirely different machines cost him essentially nothing. Tearing apart version one left him with the same stepper motors, aluminum extrusions, and electronics as when he started out. Except that he now knew so much more about his particular problem space. Now he’s ready to go again.
So if you’re at all robotically inclined, but you’re looking at the cost of motors, belts, bearings, and steel, don’t think of it as an expense for this project, but for years’ worth of iterations, and maybe even fully different machines.
Just be sure to take [Andrew]’s lead and get it down and documented before you take it apart! Heck, send it in to Hackaday and it’ll live forever.