
In October the Nine-O-Nine, a fully restored Boeing B-17G bomber owned and operated by the Collings Foundation, crashed with thirteen people on board. After landing hard and skidding into the de-icing tanks at the Bradley International Airport, all but the tail and port wing of the 74 year old WWII aircraft was destroyed. Seven lives were lost in the accident, including that of Pilot Ernest “Mac” McCauley, who was regarded as one of the most experienced B-17 pilots in the world.
 While the National Transportation Safety Board (NTSB) investigation is still ongoing and hasn’t made a final determination as to what ultimately brought down the Nine-O-Nine, enough serious maintenance issues were uncovered while examining the wreckage that the Federal Aviation Administration (FAA) has decided to rescind the Collings Foundation’s license to conduct any more paid flights on their remaining WWII aircraft. While many have spoken out in support of these “living history” flights, the FAA says they must be conducted in such a way that they don’t hinder the safety of other air traffic.
While the National Transportation Safety Board (NTSB) investigation is still ongoing and hasn’t made a final determination as to what ultimately brought down the Nine-O-Nine, enough serious maintenance issues were uncovered while examining the wreckage that the Federal Aviation Administration (FAA) has decided to rescind the Collings Foundation’s license to conduct any more paid flights on their remaining WWII aircraft. While many have spoken out in support of these “living history” flights, the FAA says they must be conducted in such a way that they don’t hinder the safety of other air traffic.
With the vast majority of the B-17’s airframe gone, the NTSB investigation has focused on the four 1,200 horsepower Wright R-1820 “Cyclone” engines recovered from the crash site. Investigators found that hastily attempted repairs to engine number 4, which is believed to have failed in-flight, were actually hindering normal operation:
Regarding engine 4, to prevent the magneto “P” leads from separating from the
magnetos, someone had attempted to rig the magneto leads in place with safety wire.Inspection and testing of engine 4 left magneto revealed the movement of the safety-wired lead caused grounding to the case, which rendered the magneto lead inoperative.
Further, all of the spark plugs in the number 3 and 4 engines were found to be fouled and had electrode gaps that were out of tolerance. From an examination of the aircraft’s maintenance records, it was also learned that an arcing and burned wire had been replaced without any investigative steps taken to find what caused the failure to begin with.
With basic maintenance tasks either not being performed or at least done incorrectly, the FAA has called into question the culture of safety at the Collings Foundation. The paper is careful not to directly accuse the Foundation or any of its staff with outright negligence, but the implication seems clear.
The loss of Nine-O-Nine hit especially close to home for Hackaday. Just a month prior to the crash we had the opportunity to tour the aircraft, and came away with a newfound respect for not only those who designed and built the iconic bomber but the brave young men who flew it. Losing such a rare and historically significant aircraft and its crew was already a tragedy, but to find that negligence may be to blame is truly inexcusable.




 Cortex 1 was launched as part of
Cortex 1 was launched as part of  Cortex 2 uses a different rocket motor from its predecessor, which led to another interesting design issue. The new motor is similar to hobby solid rocket motors where a small explosive charge at the top of the motor blows some time after the fuel is gone. This charge is meant to eject a parachute, but the Cortex 2 is not designed to use this method, and so the gasses must be vented. [Foaly] was understandably not enthusiastic about venting hot gasses through the mostly-PLA rocket body. Instead, a cylindrical cartridge was designed that both encases the motor and redirects any gasses from the explosive charge out the rear of the rocket. That cartridge was SLA printed out of what looks to us like Formlabs’
Cortex 2 uses a different rocket motor from its predecessor, which led to another interesting design issue. The new motor is similar to hobby solid rocket motors where a small explosive charge at the top of the motor blows some time after the fuel is gone. This charge is meant to eject a parachute, but the Cortex 2 is not designed to use this method, and so the gasses must be vented. [Foaly] was understandably not enthusiastic about venting hot gasses through the mostly-PLA rocket body. Instead, a cylindrical cartridge was designed that both encases the motor and redirects any gasses from the explosive charge out the rear of the rocket. That cartridge was SLA printed out of what looks to us like Formlabs’ 


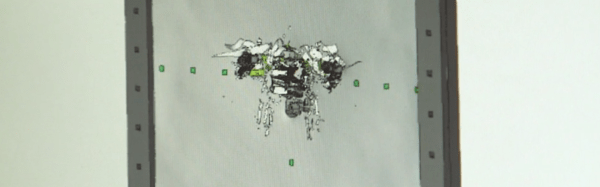
 Airplanes are apparently armored to withstand a strike from an 8lb bird. However, even if in a similar weight class, a drone is not constructed of the same stuff. To understand if this mattered, step one was to exactly model a
Airplanes are apparently armored to withstand a strike from an 8lb bird. However, even if in a similar weight class, a drone is not constructed of the same stuff. To understand if this mattered, step one was to exactly model a 








