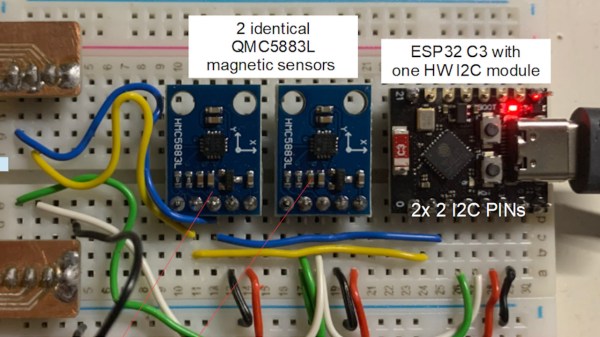
Using hardware I2C on an ESP32? Do you need to connect multiple I2C devices with the same address? Normally, you wouldn’t be able to do that without extra parts, but on the ESP32, [BastelBaus] has found a nice hack — just connect your devices to different pins and slightly abuse the ESP32 GPIO muxing, no extra hardware required!
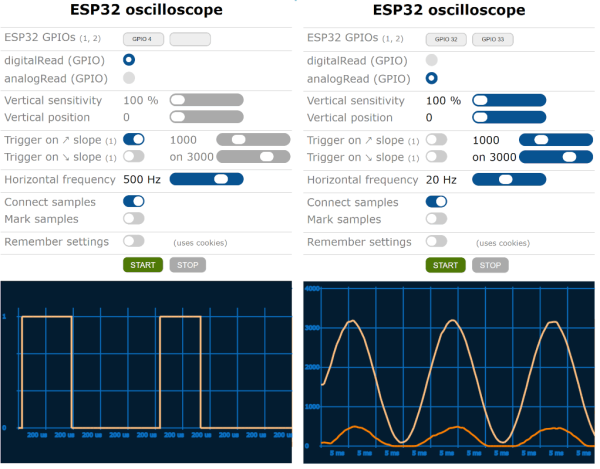
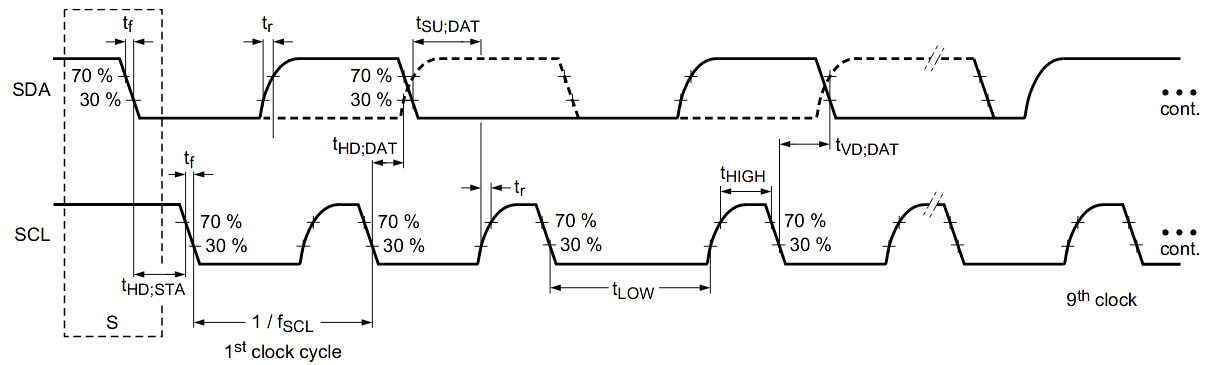
Initially, they tried separating SDA and SCL completely, and after a bit of tinkering, that’s worked out wonders! For this method, [BastelBaus] provides example Arduino code you could easily integrate into your project, and shows logic analyzer captures that demonstrate there’s barely any overhead. Later, they’ve also found out that you could multiplex only one of the pins, specifically, SDA, having the SCL line be common! As far as we see, this could also work out with split SCL, but do let us know if that doesn’t sound right.
Typically, such a problem is solved with an I2C multiplexer, and we’ve highlighted projects with them before. However, this simple method could also work on chips like the RP2040 or even the Raspberry Pi 4 — just a bit more limited, since the GPIO muxing for I2C has less available ports! Also, if you’re not using a chip with such a comfortable GPIO mux and you must use devices with overlapping addresses, check out the comment section under our I2C ecosystem article – there’s a fair few other methods you can use. And, if this method ever malfunctions for you, there’s a bunch of very straightforward ways you could debug your bus!